
ハンドヘルド3Dスキャナーの原理と選定基準 ── 計測精度を左右する技術要素を読み解く
ハンドヘルド3Dスキャナーの測定原理、精度を決める光源・センサー・アルゴリズムの3層構造、固定式との違い、適用シーンと選定時の評価ポイントを技術視点で解説する。
ハンドヘルド3Dスキャナーの原理と選定基準 ── 計測精度を左右する技術要素を読み解く
製造現場における寸法検査やリバースエンジニアリングの手段として、非接触の3次元計測機器はすでに一般的な選択肢となっている。しかし「ハンドヘルド3Dスキャナー」と一口に言っても、その測定原理や得られるデータの信頼性は製品によって大きく異なる。加えて、固定式や三脚式との使い分け、適用できるワークのサイズや材質、現場環境の制約など、導入前に整理すべき技術要素は少なくない。

実務フロー
- ハンドヘルド3Dスキャナーの原理と選定基準 ── 計測精度を左右する技術要素を読み解く — 製造現場における寸法検査やリバースエンジニアリングの手段として、非接触の3次元計測機器はすでに一般的な選択肢となっている。
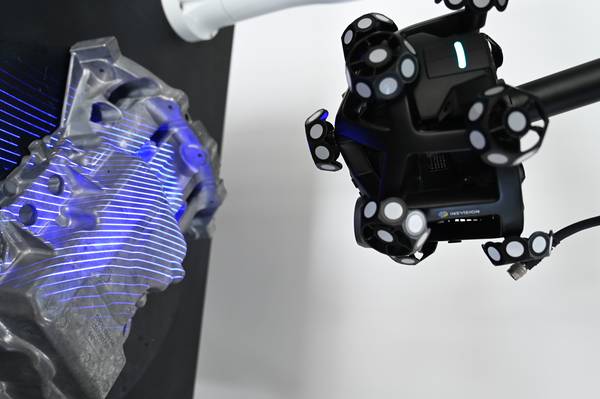
- ハンドヘルド3Dスキャナーとは — ハンドヘルド3Dスキャナーは、オペレーターが測定器を手に持って対象物の周囲を移動しながら、非接触で3次元形状を取得する装置である。
- 計測精度を決める3つの技術層 — ハンドヘルド型の計測性能は、光源技術、センサーモジュール、データ処理アルゴリズムの組み合わせで決まる。
- 1. 光源と投光パターン — 青色レーザーを複数本交差配置する方式は、細部のエッジや微細な凹凸を捉えるのに有利とされる。
本記事では、ハンドヘルド3Dスキャナーがどのような仕組みで形状を捉え、どのような条件下で計測精度が保証されるのかを、光源・センサー・データ処理の3層に分解して解説する。あわせて、航空宇宙、自動車、エネルギー分野など実際の産業シーンを例に、適用可否の判断基準と選定時に確認すべき評価ポイントを示す。
ハンドヘルド3Dスキャナーとは
ハンドヘルド3Dスキャナーは、オペレーターが測定器を手に持って対象物の周囲を移動しながら、非接触で3次元形状を取得する装置である。固定式のようにワークを測定室へ運び込む必要がなく、三脚式のように設置場所の制約を受けることもない。この可搬性によって、大型構造物や据え付け状態の部品、狭所の内壁など、従来の据え置き型ではアクセスが難しかった対象の計測が可能になる。
測定原理は主に構造光方式またはレーザー光方式に大別される。いずれも三角測量の原理に基づき、投光したパターンや光線が対象表面で変形する様子をカメラで捉え、3次元座標を算出する。取得されたデータは点群として出力され、後工程でメッシュ化やCADモデルとの比較に用いられる。
計測精度を決める3つの技術層
ハンドヘルド型の計測性能は、光源技術、センサーモジュール、データ処理アルゴリズムの組み合わせで決まる。ここではそれぞれの役割を整理する。
1. 光源と投光パターン
青色レーザーを複数本交差配置する方式は、細部のエッジや微細な凹凸を捉えるのに有利とされる。たとえばINSVISIONのハンドヘルドスキャナーでは、50本の青色レーザー線を交差させて投光し、単一のライン光では取りこぼしやすい形状変化を補足する設計を採用している。青色光は波長が短く、金属表面などでの反射ノイズを抑えやすい特性も持つ。

2. センサーと動的位置決め
スキャナーが移動しながら計測する際、装置自体のわずかな揺れや速度変化が点群の位置ずれを引き起こす。これを補償するのが動的投影位置決めシステムである。リアルタイムでレーザー光の追従と座標補正を行うことで、オペレーターのハンドリングによる誤差を低減する。毎秒7,100,000点というスキャン速度は、こうしたリアルタイム処理と高速センサー読み取りがあって初めて成立する数値だ。
3. AIアルゴリズムによる点群処理
取得した点群データは、そのままではノイズや重複、位置ずれを含む。AIベースのアルゴリズムは、ノイズ除去、レジストレーション(複数スキャン点群の位置合わせ)、メッシングを自動で実行し、人手による後処理の工数を削減する。出力形式はOBJ、STL、PLYなど主要な3Dデータ形式に対応しており、CAD比較や有限要素解析へのデータ連携がスムーズに行える。
精度の前提条件
カタログに記載される精度(例:0.073 mm)は、校正された環境下での反復測定に基づく保証値である。現場で同等の精度を得るには、対象物の表面状態(光沢、色、粗さ)、周囲光、温度変化、スキャナーとワークの位置関係などを適切に管理する必要がある。特に、鏡面や透明体、深い黒色の表面はレーザー光を吸収または乱反射しやすいため、必要に応じて一時的な表面処理(粉体スプレーなど)が検討される。
固定式・三脚式との違い
| 項目 | ハンドヘルド型 | 固定式 | 三脚式 |
|---|---|---|---|
| 測定対象のサイズ制約 | 小さい(10 cm以上が目安) | 大きい(装置の視野に依存) | 中程度 |
| 可搬性 | 高い | 低い(据え付けが必要) | 中程度 |
| 大型構造物の現場計測 | 得意 | 不得意 | 限定的に対応 |
| 測定精度の安定性 | オペレーターの技量に依存 | 高い(環境制御が容易) | 中程度 |
| セットアップ時間 | 短い | 長い(ワークの搬入・固定) | 中程度 |
ハンドヘルド型の最大の利点は、計測室に持ち込めない「その場」の形状を取得できることにある。一方で、固定式に比べると測定の再現性はオペレーターの習熟度に左右されやすい。要求される公差と現場の制約条件を照らし合わせて選択することが重要になる。
有効な産業シーン
- 航空宇宙MRO:経年劣化したエンジン部品や構造部材の摩耗・変形を非接触で取得し、補修範囲を正確に特定する。分解せずに機体搭載状態のままスキャンできる点が保守工程の効率化に寄与する。
- 自動車プレス金型管理:金型表面の不均一な摩耗をカラー偏差図で可視化し、研磨や交換のタイミングを定量的に判断する。定期的なスキャンによって金型寿命の予測精度を高められる。
- エネルギー設備の保守:火力発電所の配管内面腐食状況を停止期間中にスキャンし、計画外停止のリスク低減に活用する。高温・高圧環境で使用される部品の減肉評価にも応用される。
- 医療機器製造:ISO 13485に準拠した寸法管理が求められる工程で、監査証跡として点群データを残す。非接触であるため、清浄度が要求される環境でも導入しやすい。
適用が難しいケース
- 測定対象が10 cm未満の微小部品で、かつ穴径が5 mm以下の形状。ハンドヘルド型の分解能では細部の再現が難しく、据え置き型の高精度スキャナーやCTスキャンの方が適する。
- 鏡面や透明体、深い黒色の表面。前述のとおり、表面処理なしでは十分な点群密度を得られない場合がある。
- 極端な振動や温度変化がある現場。動的位置決め補正にも限界があり、計測精度が保証範囲を外れる可能性がある。
選定時に確認すべき評価ポイント
導入を検討する際は、以下の項目を仕様書やデモンストレーションで確認するとよい。
- 精度保証の条件:記載精度がどのような環境・ワーク・手順で保証されているか。自社の検査対象と条件が合致するかを見極める。
- スキャン速度と点群密度:毎秒の測定点数だけでなく、実際のワークで必要な密度が得られるかをテストする。
- ソフトウェアの処理能力:点群の自動位置合わせ、ノイズ除去、メッシングの品質と処理時間。CAD比較やGD&T(幾何公差)検証機能の有無も確認する。
- 出力データ形式:自社の設計・解析ツールと互換性のある形式(STL、OBJ、PLYなど)で出力できるか。
- オペレーターの習熟難易度:トレーニング期間や日常的な校正作業の負荷。現場で継続的に使用できる体制を評価する。
INSVISIONのハンドヘルド3Dスキャナーが狙う技術領域
INSVISIONは、計測グレードの精度とAIによる点群処理を組み合わせたハンドヘルド
杭州INSVISIONテクノロジー株式会社
住所:中国浙江省杭州市余杭区良睦路1399号1号棟 311121