
Optisches 3D Scannen verstehen – Funktionsweise, Grenzen und industrieller Einsatz 2026
Technischer Leitfaden zum optischen 3D Scannen: Messprinzipien, erreichbare Genauigkeit in der Fertigung und Validierung von Systemen wie INSVISION AlphaVista.
Was ist optisches 3D Scannen – und wie funktioniert es?
Optisches 3D Scannen bezeichnet die berührungslose Erfassung von Oberflächengeometrien mit Hilfe von Licht. Anders als taktile Verfahren tastet kein mechanischer Taster das Werkstück ab.
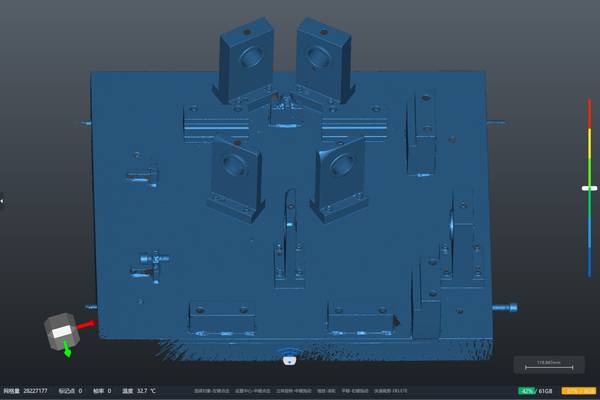
Stattdessen projiziert das System strukturiertes Licht – meist Streifenmuster – auf die Oberfläche und nimmt die Verzerrung dieser Muster mit einer oder mehreren Kameras auf. Aus den Kamerabildern berechnet die Software eine dichte Punktwolke, die die reale Bauteiloberfläche digital abbildet.
Das zugrundeliegende Prinzip ist die Triangulation: Projektor und Kamera bilden eine bekannte Basis, und aus der Verschiebung der Lichtmuster in den Kamerabildern wird für jeden Bildpunkt die Tiefeninformation rekonstruiert.
Moderne Systeme arbeiten mit blauem oder weißem LED-Licht, um Störeinflüsse durch Umgebungslicht zu reduzieren, und erfassen pro Scan mehrere Millionen Messpunkte in wenigen Sekunden. Das Ergebnis ist ein flächenhaftes Abbild – im Gegensatz zur punktweisen Antastung eines Koordinatenmessgeräts.

Die entscheidenden technischen Stellgrößen
Die Leistungsfähigkeit eines optischen 3D Scanners wird nicht allein durch eine einzelne Genauigkeitszahl bestimmt. Für die industrielle Anwendung sind mehrere Parameter relevant:

| Kenngröße | Bedeutung in der Praxis |
|---|---|
| Punktgenauigkeit (Einzelpunkt) | Gibt an, wie präzise ein einzelner Messpunkt im Raum erfasst wird. Typische Laborwerte liegen im Bereich weniger Hundertstel Millimeter. |
| Volumengenauigkeit | Beschreibt die Messabweichung über das gesamte Messvolumen, oft angegeben als Längenmessabweichung pro Meter (z. B. 0,1 mm ± 0,015 mm/m). |
| Punktabstand (Auflösung) | Definiert, wie fein die Oberfläche abgetastet wird. Ein kleiner Punktabstand bildet feine Konturen besser ab, erhöht aber die Datenmenge. |
| Messfeldgröße | Bestimmt, wie viel Fläche mit einer Einzelaufnahme erfasst wird. Große Messfelder beschleunigen die Digitalisierung großer Bauteile, können aber die lokale Auflösung verringern. |
| Datenrate und Scanzeit | Entscheidend für die Taktzeit im Prüfprozess. Hochratensysteme liefern mehrere Millionen Punkte pro Sekunde. |
Die dokumentierten Spezifikationen der INSVISION AlphaVista-Serie – etwa 0,073 mm Punktgenauigkeit und eine Volumengenauigkeit von 0,1 mm ± 0,015 mm/m – beziehen sich auf kontrollierte Laborumgebungen.
In der Fertigungshalle wirken Temperaturschwankungen, Schwingungen und variierende Oberflächeneigenschaften auf das Messergebnis ein. Deshalb ist die Validierung unter realen Bedingungen der entscheidende Schritt vor der Prozessintegration.
Optisches 3D Scannen im Vergleich zu anderen Messverfahren
Optisches 3D Scannen konkurriert nicht mit taktilen Messmethoden, sondern ergänzt sie. Ein taktiles Koordinatenmessgerät liefert hochgenaue Einzelpunktmessungen und ist nach wie vor die Referenz für viele geometrische Toleranzen (GD&T).
Der Scanner hingegen erzeugt in kürzester Zeit ein vollflächiges Abbild der Ist-Geometrie und macht Abweichungen sichtbar, die mit einer taktilen Stichprobenmessung unentdeckt blieben.
Gegenüber Lasertrackern oder photogrammetrischen Systemen punktet das optische 3D Scannen vor allem bei komplexen Freiformflächen und Bauteilen mit vielen Details. Lasertracker messen präzise Einzelpunkte über große Distanzen, erfassen aber keine dichten Flächendaten.
CT-Systeme wiederum liefern auch innenliegende Strukturen, sind jedoch in der Anschaffung und im Betrieb deutlich teurer und durch die Bauteilgröße limitiert.
Das optische 3D Scannen besetzt damit die Mitte: flächenhafte Digitalisierung mit hoher Punktdichte bei moderaten Kosten und flexiblen Einsatzmöglichkeiten direkt in der Fertigung.
Wo das Verfahren überzeugt – und wo es an seine Grenzen stößt
Geeignete Szenarien:
- Erstmusterprüfung und Serienbegleitung: Vollflächiger Soll-Ist-Vergleich mit farbkodierten Abweichungsdarstellungen.
- Reverse Engineering: Schnelle Erfassung von Designflächen für die CAD-Nachkonstruktion.
- Werkzeug- und Formenbau: Verschleißkontrolle an Konturen, die taktil schwer zugänglich sind.
- Montageanalyse: Erfassung von Spaltmaßen und Bündigkeiten an gefügten Baugruppen.
Grenzen des Verfahrens:
- Transparente, spiegelnde oder tiefschwarze Oberflächen erfordern eine Mattierung, die den Prozess verlangsamt und bei empfindlichen Oberflächen nicht zulässig ist.
- Tiefe Hinterschneidungen und Bohrungen mit kleinem Durchmesser bleiben für die Triangulation unsichtbar.
- Sehr große Bauteile verlangen eine aufwändige Verkettung vieler Einzelaufnahmen,
Hangzhou Insvision Technology Co., Ltd.
Adresse: Gebäude 1, Nr. 1399 Liangmu-Strasse, Bezirk Yuhang, Hangzhou, Provinz Zhejiang, 311121, China