
3D Scanner für große Bauteile – Funktionsweise, Anwendungen und Auswahlkriterien
3D Scanner für große Bauteile: Messprinzipien, erreichbare Genauigkeiten, Grenzen und Auswahlkriterien – ein technischer Leitfaden für Ingenieure und Qualitätsmanager.

Dieser Artikel erklärt, was hinter der Technologie steckt, wie die Systeme arbeiten, welche Randbedingungen für den industriellen Einsatz gelten und worauf Ingenieure und Qualitätsmanager bei der Auswahl achten sollten.
Der Fokus liegt auf einer sachlichen Einordnung – ohne Marketingversprechen, dafür mit technischen Zusammenhängen, die im Betriebsalltag zählen.
Was ist ein 3D Scanner für große Bauteile?
Ein 3D Scanner für große Bauteile ist ein optisches Messsystem, das die Oberfläche eines Werkstücks berührungslos digitalisiert und als geordnete Punktwolke oder trianguliertes Polygonmodell ausgibt.
Anders als ein 2D-Kamerasystem, das lediglich Kontrast- und Farbinformationen liefert, erzeugt der Scanner räumliche Koordinaten (X, Y, Z) mit einer Dichte von oft mehreren tausend Punkten pro Quadratzentimeter.
Diese Daten lassen sich direkt für Soll-Ist-Vergleiche, GD&T-Auswertungen, Reverse Engineering oder die Prozessregelung nutzen.
Häufige Fragen
Worauf sollten Teams bei Was ist ein 3D Scanner für große Bauteile? achten?
Ein 3D Scanner für große Bauteile ist ein optisches Messsystem, das die Oberfläche eines Werkstücks berührungslos digitalisiert und als geordnete Punktwolke oder trianguliertes Po…
Worauf sollten Teams bei Technische Funktionsweise und zentrale Merkmale achten?
Die meisten industriellen 3D Scanner für große Bauteile nutzen strukturiertes Licht oder Laserprojektion.

Worauf sollten Teams bei Abgrenzung zu anderen Messverfahren achten?
In der Qualitätssicherung großer Bauteile existieren mehrere etablierte Methoden.
Die Besonderheit bei großen Bauteilen liegt im Verhältnis von Bauteilabmessung zu Scanfeld. Ein einzelner Scan erfasst nur einen Teilbereich.
Deshalb arbeiten diese Systeme mit Verfahren zur globalen Registrierung: Referenzmarken, photogrammetrische Vorab-Erfassung oder Trackingsysteme sorgen dafür, dass alle Einzelscans in einem gemeinsamen Koordinatensystem zusammengeführt werden.
So entsteht aus vielen Aufnahmen ein lückenloses digitales Abbild des gesamten Bauteils.
Technische Funktionsweise und zentrale Merkmale
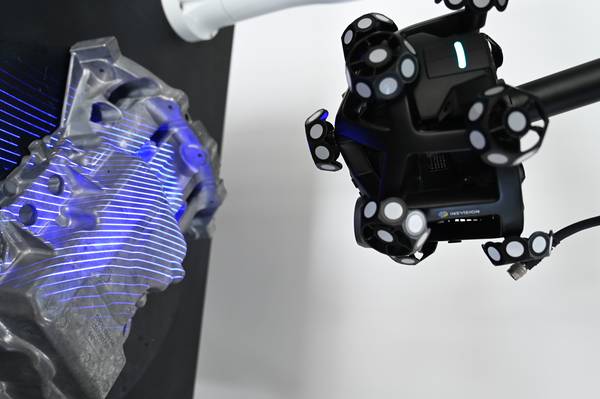
Die meisten industriellen 3D Scanner für große Bauteile nutzen strukturiertes Licht oder Laserprojektion. Ein Projektor wirft ein bekanntes Streifen- oder Punktmuster auf die Oberfläche. Kameras beobachten die Verformung des Musters aus einem oder mehreren Winkeln.
Aus den Verschiebungen berechnet die Software mittels Triangulation die 3D-Koordinaten jedes Bildpunkts.
Moderne Systeme setzen zusätzlich auf KI-gestützte Rekonstruktionsalgorithmen, um Messdaten zu verdichten, Rauschen zu reduzieren und auch bei schwierigen Oberflächen – etwa glänzenden oder dunklen Bereichen – stabile Netze zu erzeugen.

Für die Praxis sind folgende Kenngrößen entscheidend:
| Kenngröße | Bedeutung für große Bauteile |
|---|---|
| Scanfeld | Bestimmt, wie viel Fläche pro Aufnahme erfasst wird. Größere Felder reduzieren die Anzahl der notwendigen Einzelscans und damit die Messzeit. |
| Volumetrische Genauigkeit | Gibt die erreichbare Messunsicherheit im gesamten Arbeitsvolumen an, häufig als Formel (z. B. 0,015 mm + 0,025 mm/m). Sie berücksichtigt, dass der Fehler mit zunehmender Bauteilgröße ansteigt. |
| Messrate (Punkte/s oder Hz) | Beeinflusst die Scangeschwindigkeit und die Punktdichte. Hohe Raten verkürzen die Aufnahmezeit, erfordern aber leistungsfähige Datenverarbeitung. |
| Globale Registrierung | Verfahren zur Verknüpfung der Einzelscans. Ohne stabile Referenzierung entstehen sonst „schwimmende” Punktwolken, die keine prüfbare Gesamtgeometrie ergeben. |
| Software-Integration | Ausrichtalgorithmen, Abweichungsanalysen, GD&T-Module und die Möglichkeit, normgerechte Prüfberichte (z. B. nach ISO oder ASME) zu generieren, entscheiden über den Nutzen im Qualitätsprozess. |
Die Datenausgabe erfolgt typischerweise als STL-, PLY- oder proprietäres Punktwolkenformat, das direkt in gängige Mess- und Auswertesoftware übernommen werden kann.
Abgrenzung zu anderen Messverfahren
In der Qualitätssicherung großer Bauteile existieren mehrere etablierte Methoden. Die folgende Tabelle stellt die wesentlichen Unterschiede neutral gegenüber:
| Verfahren | Stärken | Grenzen bei großen Bauteilen |
|---|---|---|
| Taktile Koordinatenmessung (KMG/Portable Messarme) | Hohe Einzelpunktgenauigkeit, rückführbare Messergebnisse | Nur punktuelle Erfassung; flächige Formabweichungen werden leicht übersehen; Messzeit steigt mit Punktanzahl stark an. |
| Lasertracker | Sehr große Reichweite, hohe Genauigkeit über Distanz | Erfasst nur diskrete Punkte; keine flächige Digitalisierung; aufwendige Bedienung bei komplexen Freiformflächen. |
| Photogrammetrie | Schnelle Erfassung von Referenzpunkten über große Volumen | Keine direkte Oberflächenerfassung; wird oft als Ergänzung zur globalen Registrierung genutzt. |
| 3D Scanner für große Bauteile | Flächige, hochdichte Punktwolken; schnelle Erfassung komplexer Geometrien; direkter Soll-Ist-Vergleich | Genauigkeit abhängig von Referenzierung und Umgebungsbedingungen; bei spiegelnden oder transparenten Oberflächen kann Mattierung erforderlich sein. |
Die Verfahren schließen sich nicht aus. In vielen Fertigungslinien ergänzt ein 3D Scanner die taktile Prüfung, indem er die flächige Geometrie liefert, während taktile Systeme für hochgenaue Einzelmerkmale oder die Kalibrierung der Referenzmarken eingesetzt werden.
Geeignete und ungeeignete Anwendungsfälle
Ein 3D Scanner für große Bauteile entfaltet seinen Nutzen überall dort, wo Geometrie über große Flächen, komplexe Freiformen und viele Messpunkte bewertet werden muss. Typische Einsatzfelder sind:
- Automobilbau: First-Article-Inspection von Karosserieteilen, Spaltmaßanalysen, GD&T-Auswertung an Zusammenbauteilen, Verzugsanalyse nach dem Schweißen.
- Luft- und Raumfahrt: MRO-Aufgaben (Maintenance, Repair, Overhaul) an Strukturbauteilen, Verkleidungen oder Turb
Hangzhou Insvision Technology Co., Ltd.
Adresse: Gebäude 1, Nr. 1399 Liangmu-Strasse, Bezirk Yuhang, Hangzhou, Provinz Zhejiang, 311121, China