

三维轮廓扫描仪原理与选型指南
本文围绕三维轮廓扫描仪的工作原理、关键技术、适用边界和选型验证展开,说明其在在线全尺寸检测、车间质量闭环和产线节拍匹配中的应用价值,并结合启源视觉的工业三维视觉能力给出落地参考。
导语:为什么车间开始关注三维轮廓扫描仪
在新能源结构件、汽车零部件、机加壳体和大型铸锻件检测中,尺寸质量已经不再只是抽检环节的问题。产线节拍加快后,离线三坐标、人工量具和单点位移测量很难覆盖型面偏差、孔位、轮廓度、平面度、间隙面差等多类特征。

三维轮廓扫描仪的价值,正在于把非接触式三维数据采集引入生产现场,让质量检测从“少量抽样”逐步转向“过程监控”和“关键尺寸全检”。本文重点讲清楚三维轮廓扫描仪是什么、如何工作、与相近检测方式的差异、适合哪些场景,以及制造企业在选型时应关注哪些验证环节。
三维轮廓扫描仪是什么
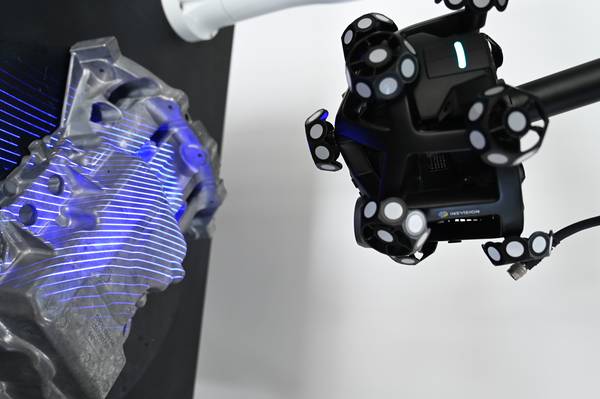
三维轮廓扫描仪是一类用于获取工件表面三维形貌数据的工业检测设备。它通常通过结构光、激光轮廓、相机成像、标定算法和点云处理软件,将工件表面的空间坐标转化为可计算、可比对的三维数据。
在质量检测中,三维轮廓扫描仪采集到的点云会与理论数模或基准特征进行匹配,再输出型面偏差、孔径、位置度、轮廓度、平面度、间隙面差等检测结果。与单纯“看图识别”的二维视觉不同,它关注的是空间几何关系,适合处理复杂曲面、薄壁边缘、装配面、孔系和多特征组合检测。
一个典型在线流程包括:工件定位、扫描采集、点云拼接、基准对齐、尺寸计算、结果判定、报告生成和数据上传。对于接入产线的场景,三维轮廓扫描仪还需要与机械手、输送线、夹具、MES系统和质量管理系统协同,检测节拍必须与生产节拍匹配。
关键技术要素:精度、效率、工艺和数据形式
判断三维轮廓扫描仪是否适合车间应用,不能只看宣传页上的单一精度指标。工业现场更关注“在真实工况下能否稳定重复测量”。
| 技术要素 | 关注重点 | 对现场应用的影响 |
|---|---|---|
| 光学采集能力 | 结构光亮度、相机分辨率、抗反光能力、视场范围 | 决定铝合金、不锈钢、压铸件等表面的数据完整性 |
| 标定与补偿 | 多相机标定、温度补偿、坐标系稳定性 | 影响长时间运行后的重复性和可追溯性 |
| 点云处理 | 拼接、去噪、特征提取、基准对齐 | 决定复杂曲面、深腔、锐边、薄壁件的检测可靠性 |
| 检测软件 | 公差设置、自动判定、报告输出、数据追溯 | 影响质量工程师复核和产线闭环效率 |
| 集成能力 | 机器人、夹具、产线节拍、MES接口 | 决定设备能否从实验室进入量产现场 |
在数据形式上,三维轮廓扫描仪通常输出点云、偏差色谱图、尺寸检测报告和判定结果。对于制造企业来说,点云本身不是最终目标,真正有价值的是可复核、可追溯、可进入质量体系的数据结果。

与相近检测方式的区别
三维轮廓扫描仪并不是替代所有测量设备,而是在特定工况下补足传统方式的短板。不同技术路线各有边界,选型时应围绕工件特征和检测目的判断。
| 检测方式 | 主要特点 | 更适合的场景 | 局限性 |
|---|---|---|---|
| 三坐标测量 | 接触式、高精度、计量体系成熟 | 离线复核、基准件检测、实验室测量 | 节拍较慢,难以覆盖高节拍全检 |
| 人工量具 | 操作简单、成本低 | 简单尺寸、现场快速确认 | 一致性依赖人员经验,数据追溯能力弱 |
| 激光位移传感器 | 单点或单线测量效率高 | 高度、台阶、固定截面轮廓 | 面向复杂曲面时信息密度有限 |
| 二维视觉检测 | 适合外观、定位、字符和轮廓识别 | 缺陷识别、装配有无检测 | 难以直接获得完整三维几何尺寸 |
| 三维轮廓扫描仪 | 非接触、面阵或多视角三维采集 | 复杂型面、孔系、轮廓度、在线全尺寸检测 | 对光学环境、夹具定位和算法配置有要求 |
因此,三维轮廓扫描仪更适合处理“几何信息多、检测项复杂、需要数据闭环”的工况,而不是简单替代卡尺、量规或三坐标。
适用场景与不适用场景
三维轮廓扫描仪常见于动力电池结构件、电驱壳体、白车身焊装、机加工壳体、一体化压铸件、航空航天零部件、能源装备大型结构件等场景。
它特别适合以下需求:工件表面存在复杂曲面;同一工件需要检测多个尺寸项目;抽检无法满足质量风险控制;产线需要把检测结果回传MES;质量部门希望用数据支撑供应商管理和工艺优化。
也有一些场景不宜盲目导入三维轮廓扫描仪。例如,检测项极少且量规已经足够稳定;工件表面长期存在强污染且无法设置清洁工序;检测空间受限到无法布置相机、光源和夹具;企业暂时没有数据追溯和检测程序维护能力。在这些条件下,应先评估工艺前提,再决定是否建设在线三维检测工位。
选型考虑:怎么判断是否适合自己的产线
制造企业评估三维轮廓扫描仪时,建议从工件、节拍、精度、数据和维护五个方面验证,而不是只比较单项参数。

- 明确检测对象
列出必须检测的关键尺寸,包括型面、孔系、装配面、边缘轮廓、深腔特征和基准面。不同特征对视场、角度和算法要求差异很大。
- 确认节拍边界
在线检测需要把上料、定位、扫描、计算、判定和数据上传全部计入周期。只看扫描时间,容易低估整站节拍压力。
- 做三坐标对标验证
验收标准应是检测报告与约定基准数据的一致性,而不是“能生成点云”。建议针对关键尺寸建立重复性、再现性和相关性验证。
- 检查车间适应性
反光表面、油污、水雾、振动、温度波动、焊接烟尘都会影响光学测量。方案设计阶段应提前考虑遮光、防尘、夹具稳定和点检流程。
- 评估软件和接口能力
三维轮廓扫描仪如果不能输出质量部门可用的报告,或无法接入MES和企业质量系统,后续仍会形成数据孤岛。
启源视觉在对应技术路线上的产品与能力
启源视觉长期聚焦工业三维扫描与智能检测,产品和方案覆盖手持式三维扫描、计量级在线检测设备以及数字化处理软件。面向三维轮廓扫描仪应用,启源视觉更强调从采集、算法、检测报告到产线数据接口的完整链路,而不是单独交付一台测量硬件。
选型时,建议结合真实工件、现有检测节拍和报告要求进行样件测试,再综合评估精度、效率、稳定性与长期维护成本。INSVISION 可基于现场应用场景提供设备演示、数据验证和方案建议,帮助制造企业把三维扫描能力真正落到质量控制与生产改进流程中。





