

三维面扫描设备产线应用误区与选型要点
三维面扫描设备如何用于产线检测?本文从工作原理、点云质量、精度边界、适用场景和选型验证出发,梳理常见认知误区,帮助制造企业建立可落地的检测方案。
导语:产线为什么开始关注三维面扫描设备
国内制造产线近几年讨论三维面扫描设备的频率明显提高。从动力电池托盘的全尺寸检测,到一体化压铸后底板的型面偏差分析,再到白车身分拼线的在线测量,面扫描技术正在从实验室检测走向节拍要求更高的批量产线。
要点速览
- 国内制造产线近几年讨论三维面扫描设备的频率明显提高。
- 三维面扫描设备是一类通过光学方式获取物体表面三维形貌数据的检测设备。
- 很多技术任务书会直接引用设备宣传资料中的标称精度,并把它作为验收红线。
- “单次采集快”并不等于“整站检测快”。
但在实际选型和导入过程中,技术负责人和采购决策者常会遇到几个问题:宣传册上的精度能不能等同于现场精度?扫描速度快是否就代表节拍有保障?三维面扫描设备能否替代部分三坐标过程检?国产设备能不能进入关键工序?本文围绕这些问题,从原理、边界条件、选型验证和落地流程展开,帮助产线把判断依据放回检测本质。
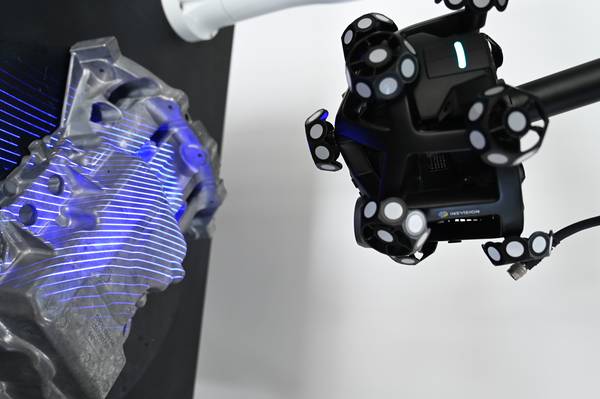
三维面扫描设备是什么:核心概念与工作原理
三维面扫描设备是一类通过光学方式获取物体表面三维形貌数据的检测设备。与单点接触式测量不同,它一次采集的是被测物表面的片区数据,经过点云生成、拼接、坐标对齐和特征提取后,可用于尺寸检测、轮廓度分析、型面偏差比对、逆向建模和质量追溯。
在产线场景中,三维面扫描设备通常围绕三个环节工作:

| 环节 | 作用 | 对产线落地的影响 |
|---|---|---|
| 数据采集 | 获取工件表面的三维点云 | 受材质、反光、油污、姿态和光照影响 |
| 点云处理 | 完成拼接、去噪、补洞和坐标对齐 | 决定数据是否稳定、完整、可重复 |
| 检测输出 | 与CAD数模或检测基准比对 | 形成尺寸报告、色谱偏差图和趋势数据 |
因此,判断三维面扫描设备不能只看单一参数,而要看“采得准、算得稳、对得上、传得出”这条链路是否闭环。
1. 标称精度不等于产线实测精度
很多技术任务书会直接引用设备宣传资料中的标称精度,并把它作为验收红线。这个做法容易忽略现场工况差异。实验室环境通常更接近恒温、低振动、表面状态可控的理想条件,而产线会面对温度波动、设备振动、工件表面反光、氧化皮、油污和定位误差。
更有落地价值的指标,是三维面扫描设备在真实节拍下的重复性、再现性和动态测量能力。对于压铸件、冲压件、焊接总成等工件,建议在现场使用代表性样件做多轮测量系统分析,观察同一特征在多次采集、不同班次和不同操作者条件下的数据波动。只有测量波动相对工艺公差留出足够余量,检测数据才适合进入质量追溯和过程控制。

2. 扫描速度只是节拍的一部分
“单次采集快”并不等于“整站检测快”。产线真正消耗时间的环节,往往包括点云拼接、无效数据剔除、特征提取、数模比对、报告生成和数据上传。如果算法对复杂曲面、深腔、窄边、反光边缘处理效率不足,采集速度再快,也可能在后处理环节形成堵点。
合理的节拍评估方式,是把三维面扫描设备的完整检测流程拆开验证:装夹定位需要多久,采集路径是否稳定,点云处理是否自动化,检测报告能否按工位要求输出,数据能否进入MES或质量管理系统。只有整条流程跑通,扫描速度才真正服务于产线效率。

3. 点云密度决定可检测特征的边界
面扫描不是“点越多越好”,也不是“幅面越大越好”。检测密封平面度、微小圆角、窄边轮廓度、焊缝邻近区域时,局部点云密度不足会影响拟合稳定性;而盲目提高点云密度,又可能增加计算压力和存储负担。
较稳妥的做法,是根据被测特征的尺寸、公差、表面状态和节拍要求,反推采样分辨率、扫描姿态和拼接策略。三维面扫描设备的价值不在于堆参数,而在于让点云质量与检测目的匹配。
与相近检测方式的区别
三维面扫描设备并不是要在所有场景替代传统检测方式,而是补足“全域形貌数据”和“快速趋势判断”的能力。

| 检测方式 | 主要特点 | 适用方向 | 局限性 |
|---|---|---|---|
| 三坐标测量 | 接触式点位测量,基准体系成熟 | 高精度关键尺寸、基准复核 | 对大面积型面趋势获取效率较低 |
| 量检具 | 操作直观,适合固定特征快速判断 | 批量产线的通止判断 | 数据化程度有限,难呈现全域偏差 |
| 二维视觉 | 速度快,便于集成 | 平面尺寸、字符、缺陷识别 | 难直接获取复杂三维形貌 |
| 三维面扫描设备 | 面数据采集,可输出点云和偏差色谱 | 型面偏差、全尺寸检测、逆向工程、趋势分析 | 对表面状态、定位基准和算法流程有要求 |
在冲压件首件检验中,型面回弹、局部拉





