

3d三维扫描仪原理与产线质检应用
本文围绕3d三维扫描仪的工作原理、关键技术、适用边界、选型验证和工业质检应用展开,帮助制造业技术负责人判断其是否适合来料检测、首件检验、过程抽检与逆向工程。
导语:为什么产线质检开始关注三维数据
在新能源电池托盘、压铸件、冲压钣金、焊接总成等工件检测中,很多质量问题并不是二维轮廓能完全描述的。平面度、孔位空间偏差、型面回弹、装配基准变形,都需要三维坐标数据才能判断。3d三维扫描仪之所以进入更多工厂的质量工位,本质原因是它能把工件表面转换为可计算的点云,再与CAD数模或检测基准进行比对。

要点速览
- 在新能源电池托盘、压铸件、冲压钣金、焊接总成等工件检测中,很多质量问题并不是二维轮廓能完全描述的。
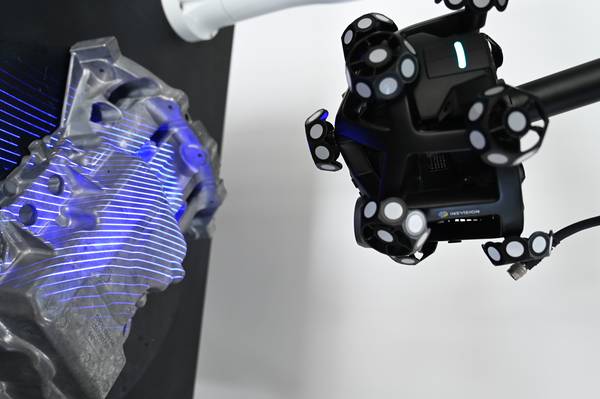
- 工业级3d三维扫描仪通常由光学测头、投射单元、相机、标定系统和计算软件组成。
- 判断一台3d三维扫描仪能不能用于工业质检,不能只看宣传页上的单项参数,还要看它在真实车间环境里的完整链路表现。
- 3d三维扫描仪并不是要取代所有检测手段。
对制造业技术负责人和采购决策者来说,真正需要弄清楚的不是“设备看起来是否先进”,而是它在什么工况下能稳定工作、能替代哪些检测流程、哪些场景仍需要三坐标测量机或专用检具配合。本文从原理、边界、选型和应用场景展开说明。
3d三维扫描仪是什么:核心概念与工作原理
工业级3d三维扫描仪通常由光学测头、投射单元、相机、标定系统和计算软件组成。常见技术路线包括结构光扫描和激光线扫描。结构光通过投射编码条纹到工件表面,相机采集条纹变形后计算空间坐标;激光线扫描则利用激光线与被测表面的交线变化,通过三角测量获得三维点位。
扫描完成后,系统生成的是点云数据。点云不是普通图片,也不是单纯边缘轮廓,而是一组带有空间坐标的信息集合。软件会对点云进行拼接、去噪、对齐和特征提取,再输出尺寸偏差、形位偏差、型面色谱图或检测报告。

这也是三维扫描与二维视觉的根本区别。二维视觉更适合识别缺料、划伤、字符、边缘位置等平面信息;三维扫描更适合处理高度、曲面、翘曲、孔位空间关系和复杂型面偏差。
关键技术要素:精度、效率、工艺与数据形式
判断一台3d三维扫描仪能不能用于工业质检,不能只看宣传页上的单项参数,还要看它在真实车间环境里的完整链路表现。影响检测结果的因素主要包括光学成像、标定稳定性、表面适应性、算法处理能力和数据对接能力。
| 技术要素 | 关注点 | 对产线质检的影响 |
|---|---|---|
| 精度与重复性 | 同一工件多次扫描结果是否一致 | 决定能否用于尺寸判定和过程趋势分析 |
| 表面适应性 | 反光、深色、切削液残留、粗糙表面等情况 | 影响点云完整度和噪点控制 |
| 扫描效率 | 单件扫描、拼接、计算、报告生成所需时间 | 决定是否能匹配抽检或在线节拍 |
| 数据处理 | 点云去噪、特征识别、CAD比对、报告模板 | 决定工程师是否能快速得到结论 |
| 系统集成 | 是否能与MES、质量数据库或自动化工位对接 | 决定扫描结果能否进入质量数据链 |
启源视觉在固定式扫描头和手持扫描设备中采用蓝光窄带滤光、结构光解算、点云处理和自动化检测软件等技术组合,目标是在车间照明、工件表面状态不完全理想的条件下,尽量获得稳定可用的数据。实际选型仍应以样件试扫和测量系统分析为依据。
与相近技术的区别
3d三维扫描仪并不是要取代所有检测手段。它与三坐标测量机、二维视觉、专用检具各有适用边界。理解差异,才能避免选型偏差。
| 检测方式 | 主要输出 | 适合场景 | 局限性 |
|---|---|---|---|
| 三维扫描 | 点云、色谱偏差、全型面数据 | 曲面件、钣金件、铸件、焊接件、逆向工程 | 高反光或透明件可能需要工艺处理 |
| 三坐标测量机 | 离散点尺寸、形位数据 | 高精度基准尺寸、关键特征复核 | 全型面检测效率较低 |
| 二维视觉 | 图像、边缘、字符、缺陷识别 | 外观缺陷、字符识别、平面定位 | 难以直接量化空间变形 |
| 专用检具 | 合格/不合格判断、局部定位 | 大批量单一产品快速判定 | 柔性不足,换型成本较高 |
在很多工厂里,三维扫描更常见的角色是补强质量检测链路:用它快速获取全型面偏差,再用三坐标对关键基准或争议尺寸进行复核。这样的组合比单独依赖某一种方法更接近工业现场的真实需求。
适用场景与不适用场景
3d三维扫描仪适合处理形状复杂、检测点多、需要全局偏差分析的工件。例如冲压件回弹分析、压铸件毛坯余量判断、焊接总成装配偏差检测、新能源电池托盘平面度控制、注塑件变形分析、模具修复前的逆向建模等。

它也适合首件检验和来料抽检。新模具试制、换模后首件确认、供应商来料批次波动追踪,都需要快速知道“哪里偏、偏多少、偏差是否呈现规律”。点云与CAD比对后的色谱图,能让模具、工艺和质量人员在同一张图上沟通问题。
不适用场景同样需要提前确认。透明件、强镜面反光件、狭深孔内部、被遮挡严重的内腔结构,可能无法直接获得完整点云;对极少数关键尺寸进行最高精度仲裁时,三坐标测量机仍然更适合;如果产线节拍极短且没有自动上下料、定位夹具和数据接口,单独购买扫描设备也难以形成稳定闭环。
选型考虑:怎样判断是否适合自己的工厂
选型时,建议从工件和流程反推设备,而不是从设备型号反推应用。制造企业可以按以下问题进行内部评估:

- 被测工件是平面特征为主,还是曲面、型面、空间孔位较多?
- 质量判定需要全型面偏差,还是只需要少量关键尺寸?
- 工件表面是否存在高反光、深色、透明、油污、粉尘等情况?
- 检测节拍是实验室复核、线边抽检,还是自动化在线检测?
- 检测结果是否需要回传MES、质量数据库或工艺参数系统?
- 工厂是否具备夹具定位、样件管理、报告复核和人员培训条件?
真正可靠的选型





