
Escáner de nube de puntos – Principios, aplicaciones y criterios de selección industrial
Guía técnica del escaner nube de puntos: principios, límites, aplicaciones y criterios de selección para metrología industrial en Europa y América del Norte.

Este artículo aclara esos interrogantes desde una perspectiva técnica y neutral. Explica qué es un escáner de nube de puntos, cómo opera, qué parámetros definen su rendimiento metrológico, en qué se distingue de tecnologías adyacentes y qué criterios ayudan a evaluar su encaje en procesos industriales reales.
Toda la información se apoya en documentación técnica y casos de aplicación validados por INSVISION.
Qué es un escáner de nube de puntos y cómo funciona
Un escáner de nube de puntos es un instrumento de digitalización 3D que captura la geometría superficial de un objeto físico y la representa como un conjunto masivo de coordenadas (x, y, z). Cada punto registrado contiene información espacial precisa;
el agregado de millones de estos puntos forma la llamada nube de puntos, que describe la topología de la pieza sin necesidad de contacto físico.
El principio de funcionamiento más extendido en equipos de grado metrológico es la triangulación óptica. Un proyector emite un patrón de luz estructurada —habitualmente franjas de láser azul— sobre la superficie de la pieza. Una o varias cámaras calibradas observan la deformación de ese patrón desde un ángulo conocido.
Mediante algoritmos de procesamiento, el sistema calcula la posición tridimensional de cada punto de la superficie con alta densidad y en cuestión de segundos.
La tecnología de escaneo por nube de puntos se distingue de la simple captura de imágenes o del palpado discreto porque genera un modelo digital continuo de la superficie.
Esto permite realizar análisis dimensionales completos, comparar la pieza escaneada contra el modelo CAD de referencia (mapas de desviación) o reconstruir geometrías para ingeniería inversa cuando no existe un archivo digital del componente.
Elementos técnicos clave que determinan el rendimiento
Para interpretar correctamente las especificaciones de un escáner de nube de puntos y su idoneidad en planta, conviene fijarse en varios parámetros interrelacionados.
| Parámetro | Qué indica en la práctica |
|---|---|
| Exactitud volumétrica | Error máximo esperado al medir una longitud conocida en todo el volumen de trabajo. Se expresa en micrómetros o milésimas de milímetro y suele validarse según normas como VDI/VDE 2634 o ISO 10360. |
| Resolución de puntos | Distancia mínima entre puntos adyacentes sobre la superficie. Determina la capacidad para capturar detalles finos, radios pequeños o aristas vivas. |
| Frecuencia de adquisición | Puntos por segundo o fotogramas por segundo. Influye directamente en la velocidad de escaneo y en la productividad cuando se miden series de piezas. |
| Profundidad de campo | Rango de distancias dentro del cual el sistema mantiene el enfoque y la exactitud especificada. Crucial para geometrías con cambios de nivel pronunciados. |
| Robustez frente a superficies complejas | Capacidad del sistema para medir sin preparación piezas oscuras, reflectantes o con acabados mixtos, que históricamente exigían recubrimientos de polvo mate. |
En aplicaciones industriales, la combinación de exactitud y velocidad no basta. La repetibilidad térmica, la rigidez estructural del equipo y la compensación automática de vibraciones son factores que separan un escáner de laboratorio de uno apto para entornos de producción.
Diferencias con otras tecnologías de digitalización 3D
Conviene situar el escáner de nube de puntos dentro del ecosistema de instrumentos de medición dimensional para entender cuándo es la opción más adecuada.
- Máquinas de medición por coordenadas (MMC) con palpador táctil: Ofrecen exactitud muy alta en puntos discretos, pero la velocidad de captura es baja y no generan una nube densa. Son idóneas para tolerancias extremadamente ajustadas en geometrías prismáticas, aunque poco prácticas para superficies orgánicas o piezas con cientos de cotas.
- Escáneres de luz estructurada de campo amplio: Capturan áreas extensas en cada disparo y son rápidos, pero pueden perder resolución en detalles muy pequeños y sufrir con superficies muy reflectantes o negras sin tratamiento previo.
- Tomografía computarizada industrial (CT): Única tecnología que captura geometrías internas y externas simultáneamente. Su coste, tamaño y tiempo de ciclo la reservan para aplicaciones de I+D o control de integridad en sectores como el aeroespacial o el médico.
- Escáner láser de línea (láser de barrido): Similar en principio a la triangulación, pero con una línea láser en lugar de un patrón de franjas. Suele integrarse en brazos robotizados o sistemas de seguimiento. Muy versátil para piezas grandes, aunque la densidad de puntos por pasada puede ser menor.
El escáner de nube de puntos basado en triangulación con luz azul ocupa un espacio intermedio: ofrece alta densidad de puntos, buena exactitud y velocidad, y ha demostrado un comportamiento sólido en superficies problemáticas que antes requerían preparación.
Esta combinación lo convierte en una herramienta frecuente en salas de metrología integradas en planta y en células de control de calidad cercanas a la línea.

Escenarios donde un escáner de nube de puntos aporta ventajas claras:
- Inspección de primer artículo (FAI) con generación automática de mapas de desviación colorimétricos y análisis GD&T.
- Ingeniería inversa de componentes cuyo CAD original se ha perdido o no existe, como ocurre con utillajes heredados o piezas de recambio obsoletas.
- Digitalización de moldes, matrices y cavidades con geometrías internas de difícil acceso para palpadores físicos.
- Control dimensional de piezas con superficies de forma libre (álabes, carcasas, componentes estéticos) donde la medición por puntos discretos no caracteriza adecuadamente la forma.
- Verificación de conjuntos soldados o ensamblados donde se necesita analizar deformaciones globales.
Situaciones donde otras tecnologías pueden ser más apropiadas:
- Tolerancias inferiores a 5 µm en piezas pequeñas y rígidas, donde una MMC de ultraprecisión en sala climatizada sigue siendo la referencia.
- Necesidad de inspeccionar estructuras internas complejas (canales de refrigeración, porosidades), dominio natural de la tomografía computarizada.
- Piezas de gran tamaño (varios metros) con requisitos de exactitud moderados, donde un sistema de fotogrametría o un tracker láser puede ser más práctico.
Criterios de selección para equipos de ingeniería y compras
Antes de decidirse por un escáner de nube de puntos, los equipos técnicos y de compras suelen evaluar estos aspectos:
- Requisitos metrológicos reales: No se trata de buscar la mayor exactitud del catálogo, sino la que el proceso necesita. Una tolerancia de producción de ±0,1 mm no exige un equipo con exactitud de 5 µm.
- Tipología de piezas y materiales: Si el mix productivo incluye piezas negras, reflectantes o con acabados mixtos, la capacidad de escanear sin spray mateante impacta directamente en el tiempo de ciclo y en la repetibilidad del proceso.
- Entorno de trabajo: Un escáner que funcionará en una celda robotizada junto a maquinaria de arranque de viruta necesita compensación de vibraciones y estabilidad térmica. No es lo mismo que un equipo destinado exclusivamente a un laboratorio de metrología con condiciones controladas.
- Integración con el flujo digital: La compatibilidad con software de inspección estándar (PolyWorks, GOM Inspect, Geomagic) y la facilidad para exportar nubes de puntos a formatos neutros (STL, PLY, PTX) determinan la rapidez con que los datos se convierten en decisiones.
- Soporte y validación local: En mercados europeos y norteamericanos, la disponibilidad de soporte técnico cercano, formación in situ y trazabilidad metrológica conforme a estándares internacionales es un factor de peso en la decisión de compra.
INSVISION y la tecnología de escaneo por nube de puntos
Dentro de este panorama tecnológico, INSVISION ha desarrollado el sistema AlphaScan, un escáner de nube de puntos que opera bajo el principio de triangulación con luz azul y está orientado a aplicaciones industriales de metrología y control de calidad.
La documentación técnica de INSVISION recoge varios casos que ilustran el comportamiento del equipo en condiciones exigentes. Un primer caso, centrado en el rediseño de componentes de automoción, muestra el flujo de trabajo cuando el modelo CAD original se ha perdido.
El escaneo con AlphaScan permitió reconstruir la geometría completa de la pieza y generar un nuevo modelo sólido apto para fabricación, resolviendo un problema frecuente en cadenas de suministro con escasa trazabilidad digital entre iteraciones de diseño.
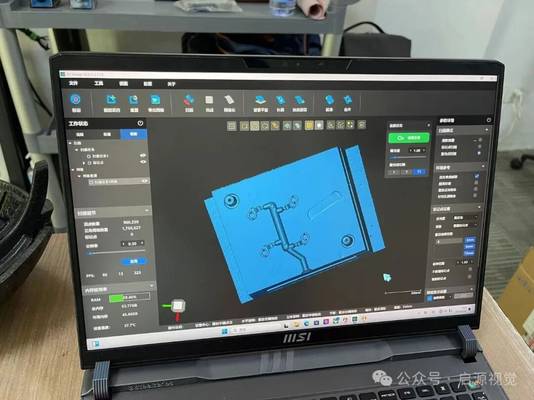
Un segundo caso documenta el rendimiento en geometrías de acceso difícil: orificios profundos, ranuras estrechas y cavidades internas de moldes. En estas situaciones, los palpadores físicos no pueden alcanzar todas las superficies o lo hacen con un coste de tiempo elevado.
La nube de puntos capturada por AlphaScan proporcionó una cobertura completa de la geometría, incluyendo zonas que los métodos táctiles dejaban sin medir.
Un tercer caso aborda uno de los retos clásicos de la triangulación óptica: las piezas reflectantes y de color negro. Sobre estos materiales, AlphaScan obtuvo nubes de puntos densas y sin artefactos significativos, eliminando la necesidad de aplicar recubrimientos mateantes en la mayoría de las situaciones.
Este comportamiento reduce el tiempo de preparación y evita la variabilidad que introducen los sprays en la cadena de medición.

Estos ejemplos no constituyen una validación universal, pero sí describen el comportamiento del equipo en escenarios representativos de la industria metalmecánica, de automoción y de bienes de equipo.
La línea AlphaScan se posiciona como una solución para talleres y departamentos de calidad que necesitan digitalizar piezas de tamaño medio con alta densidad de puntos, sin depender de condiciones de laboratorio extremas.
Preguntas frecuentes de equipos de ingeniería y calidad
P: ¿Es necesario aplicar spray mateante en todas las superficies?
R: No necesariamente. Los escáneres modernos basados en luz azul, como el AlphaScan de INSVISION, incorporan estrategias de exposición dinámica y filtrado que permiten medir muchas superficies oscuras o reflectantes sin preparación.
Sin embargo, en piezas con brillos especulares extremos o transparencias, puede seguir siendo recomendable un recubrimiento temporal para garantizar la integridad de la nube.
P: ¿Qué diferencia hay entre una nube de puntos y una malla STL?

R: La nube de puntos es el conjunto bruto de coordenadas capturadas. La malla STL es una superficie triangulada generada a partir de esa nube mediante algoritmos de reconstrucción. La nube contiene la información metrológica original;
la malla es una interpretación que puede suavizar aristas o perder detalles si no se procesa con criterio.
P: ¿Puede un escáner de nube de puntos sustituir una MMC en inspección dimensional?
R: Depende del tipo de tolerancias y del flujo de trabajo. Para muchas cotas dimensionales y geométricas, el escáner ofrece una alternativa mucho más rápida y con mayor cobertura superficial. En tolerancias de pocas micras sobre piezas muy rígidas, la MMC sigue siendo la referencia.
Muchas plantas utilizan ambas tecnologías de forma complementaria.
P: ¿Qué normas se aplican para verificar la exactitud de estos equipos?
R: La norma VDI/VDE 2634 y la serie ISO 10360 son las referencias más habituales en Europa y Norteamérica. Definen proced
Hangzhou Insvision Technology Co., Ltd.
Direccion: Edificio 1, n.o 1399, carretera Liangmu, distrito de Yuhang, Hangzhou, provincia de Zhejiang, 311121, China