
Lazer Tarama Cihazı Nedir? Çalışma Prensibi, Kullanım Alanları ve Seçim Rehberi (2026)
Lazer tarama cihazı çalışma prensibi, doğruluk kriterleri, kullanım alanları ve seçim adımlarını 2026'da ISO/ASME kalite süreçleri için pratik biçimde açıklar.
Lazer Tarama Cihazı Nedir? Temel Çalışma Prensibi
Lazer tarama cihazı, bir lazer ışınını nesne yüzeyine yansıtarak ve yansıyan ışığın sensöre ulaşma süresini veya üçgenleme açısını ölçerek milyonlarca üç boyutlu koordinat noktası (nokta bulutu) toplayan temassız bir ölçüm aracıdır.
Endüstriyel metrolojide en yaygın iki yöntem, uçuş süresi (Time-of-Flight) ve lazer üçgenlemedir (laser triangulation). El tipi veya robotik olarak kullanılan metroloji sınıfı tarayıcıların büyük çoğunluğu lazer üçgenleme prensibiyle çalışır.
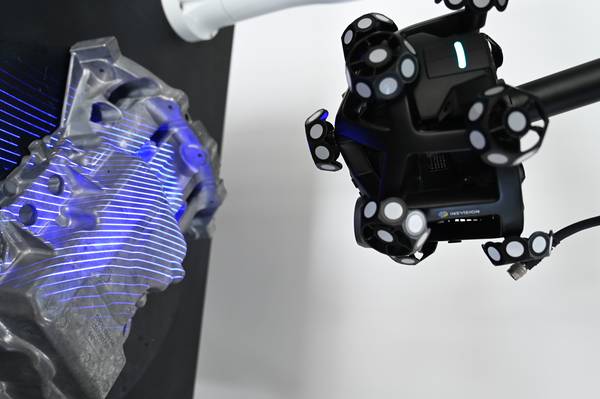
Bu yöntemde, bir lazer çizgisi veya noktası yüzeye düşer, yüzeyin geometrisine göre şekil değiştirir ve belirli bir açıyla konumlandırılmış bir kamera bu deformasyonu kaydeder. Cihazın yazılımı, lazer kaynağı, kamera ve yüzey arasındaki geometrik ilişkiyi kullanarak her bir noktanın üç boyutlu konumunu hesaplar.
Bu sürecin doğruluğu, lazer çizgisinin inceliği, kameranın çözünürlüğü, kalibrasyon kararlılığı ve yüzeyin optik özellikleri gibi birden çok değişkene bağlıdır. Parlak, koyu veya yarı saydam yüzeyler, ışığın dağılmasına veya soğurulmasına neden olarak veri gürültüsünü artırabilir.
Bu nedenle modern cihazlar, pozlama ayarlarını dinamik olarak değiştiren ve farklı yüzey koşullarına uyum sağlayan algoritmalarla donatılmıştır.
Teknolojinin Omurgası: Doğruluk, Hız ve Veri Formu
Bir lazer tarama cihazının teknik yetkinliğini değerlendirirken yalnızca broşürde yazan tek bir doğruluk değerine bakmak yanıltıcı olur. Aşağıdaki tablo, bir cihazın gerçek performansını anlamak için dikkate alınması gereken temel parametreleri özetlemektedir.
| Parametre | Açıklama | Endüstriyel Etkisi |
|---|---|---|
| Hacimsel Doğruluk (Volumetric Accuracy) | Belirli bir ölçüm hacmi içindeki sapmanın kapsamlı ifadesi. Genellikle µm + µm/m cinsinden verilir. | Büyük parçalarda global sapmayı belirler. Sadece tek nokta tekrarlanabilirliğine bakmak yanıltıcıdır. |
| Nokta Çözünürlüğü (Point Resolution) | İki komşu nokta arasındaki en küçük mesafe. | Keskin kenarların, ince detayların ve küçük yarıçapların yakalanma kalitesini doğrudan etkiler. |
| Tarama Hızı (Scan Rate) | Saniyede toplanan nokta veya çizgi sayısı. | Döngü süresini belirler. Yüksek hız, yoğun veriyi daha kısa sürede elde etmeyi sağlar ancak doğrulukla dengelenmelidir. |
| Lazer Dalga Boyu | Mavi (yaklaşık 450 nm) veya kırmızı (yaklaşık 660 nm) lazer. | Mavi lazer, parlak ve metalik yüzeylerde daha az beneklenme (speckle) oluşturur ve daha ince bir çizgi üretebilir; bu da genellikle daha düşük gürültü ve yüksek çözünürlük anlamına gelir. |
| Veri Çıktısı | Ham nokta bulutu, STL mesh, doğrudan CAD karşılaştırma raporu. | Kalite kontrol sürecinde GD&T sapma haritalarının (deviation map) doğrudan oluşturulabilmesi, analiz süresini önemli ölçüde kısaltır. |
Bu parametreler birbirinden bağımsız değildir. Örneğin, çok yüksek bir tarama hızı, pozlama süresini kısaltarak gürültü seviyesini artırabilir. Bu nedenle olgun bir tarama çözümü, donanım ve yazılım arasında sıkı bir entegrasyon gerektirir.

Yakın Teknolojilerle Farklar: Yapısal Işık ve Fotogrametri
Lazer tarama cihazları sıklıkla yapısal ışık (structured light) tarayıcılar ve fotogrametri sistemleriyle karşılaştırılır. Her birinin çalışma prensibi ve ideal kullanım alanı farklıdır.
Yapısal ışık sistemleri, bir dizi desenli beyaz veya mavi ışığı yüzeye yansıtır ve bu desenlerin deformasyonunu analiz eder. Genellikle sabit bir tripod üzerinde kullanılırlar ve tek bir çekimde geniş bir alanı çok yüksek doğrulukla tarayabilirler.
Lazer tarayıcılara kıyasla titreşime karşı daha hassastırlar ve parlak, karanlık veya karmaşık topolojili yüzeylerde daha fazla hazırlık (örneğin matlaştırıcı sprey) gerektirebilirler. Buna karşılık, el tipi lazer tarama cihazları operatöre daha fazla esneklik sunar;
büyük, sabitlenemeyen parçaların yerinde taranmasına olanak tanır.

Fotogrametri ise, bir nesnenin farklı açılardan çekilmiş çok sayıda fotoğrafını kullanarak üç boyutlu geometriyi yeniden oluşturur.
Büyük ölçekli nesnelerin (örneğin uçak kanadı, rüzgar türbini kanadı) genel geometrisini yakalamak için idealdir, ancak lazer taramanın sağladığı yüzey detayı ve metroloji sınıfı doğruluğu genellikle sunamaz.
Endüstriyel uygulamalarda fotogrametri, lazer tarama için bir tamamlayıcı olarak, büyük parçalarda global referans noktalarını belirlemek için kullanılır.
Hangi Senaryoda Hangi Teknoloji? Uygunluk ve Sınırlar
Bir lazer tarama cihazı her sorunu çözen sihirli bir araç değildir. Teknolojinin güçlü olduğu ve zorlandığı senaryoları netleştirmek, doğru yatırım kararı için kritiktir.

Lazer taramanın güçlü olduğu tipik senaryolar:
- Karmaşık serbest formlu yüzeylerin (plastik enjeksiyon parçaları, türbin kanatları, döküm gövdeler) hızlı dijitalleştirilmesi.
- Mevcut bir fiziksel parçadan CAD verisi olmadığında tersine mühendislik (reverse engineering) çalışmaları.
- Sac metal parçaların, kaynaklı montajların ve büyük hacimli bileşenlerin yerinde ilk parça muayenesi (first-article inspection).
- Kalıp ve fikstürlerin aşınma analizi için periyodik olarak taranması ve nominal CAD ile karşılaştırılması.
- Hızlı prototipleme döngüsünde, üretilen parçanın tasarım niyetiyle ne kadar örtüştüğünün hızlıca doğrulanması.
Lazer taramanın zorlandığı veya uygun olmadığı durumlar:
- Derin, dar ve ulaşılması zor iç kanallar veya kör delikler. Lazer ışını ve kamera görüş hattı aynı anda bu bölgelere erişemediği için veri alınamaz.
- Tamamen şeffaf veya ayna gibi yansıtıcı yüzeyler. Bu yüzeyler ışığı dağıtmak yerine yansıttığı için üçgenleme prensibi çalışmaz. Matlaştırıcı sprey geçici bir çözümdür ancak ince bir film tabakası eklediği için mikron altı doğruluk gerektiren işlerde ek bir belirsizlik oluşturur.
- Yalnızca birkaç mikron toplam toleransa sahip, çok yüksek hassasiyetli silindirik delik çapı ve konum ölçümleri. Bu tür işlerde temaslı problu bir CMM, belirsizlik bütçesi açısından hâlâ daha doğrudan ve güvenilir bir yöntemdir.
- Hareketli veya titreşimli ortamlarda, harici bir fotogrametri veya optik izleme sistemi ile desteklenmeyen el tipi tarayıcıların kullanılması. Cihazın kendi konumlandırması bozulacağı için nokta bulutu katmanları arasında kaymalar oluşur.
Seçim Kriterleri: Kendi İhtiyacınıza Uygun Cihazı Nasıl Belirlersiniz?
Bir lazer tarama cihazı seçimi, bir katalogdan en yüksek çözünürlüklü modeli almak değildir. Aşağıdaki adımlar, teknik değerl
Hangzhou Insvision Technology Co., Ltd.
Adres: Çin, Zhejiang, Hangzhou, Yuhang Bolgesi, Liangmu Yolu No. 1399, Bina 1, 311121