
3D Tarama Cihazı Nedir? Çalışma Prensibi ve 2D Görüntülemeden Farkları
Endüstriyel 3D tarama cihazının çalışma prensibini, 2D görüntülemeden farklarını, uygun kullanım senaryolarını ve seçim kriterlerini teknik bir bakışla ele alıyoruz.

Bu makale, 3D tarama teknolojisini bir satın alma rehberinden önce mühendislik kavrayışıyla ele alıyor. Amaç;
cihazın ne olduğunu, hangi fiziksel prensiplerle çalıştığını, 2D görüntülemeden hangi veri türleriyle ayrıldığını, hangi üretim problemlerinde anlamlı sonuç verdiğini ve doğrulama sürecinin nasıl kurgulanması gerektiğini netleştirmektir.
3D Tarama Cihazı Nedir? Temel Çalışma Prensibi
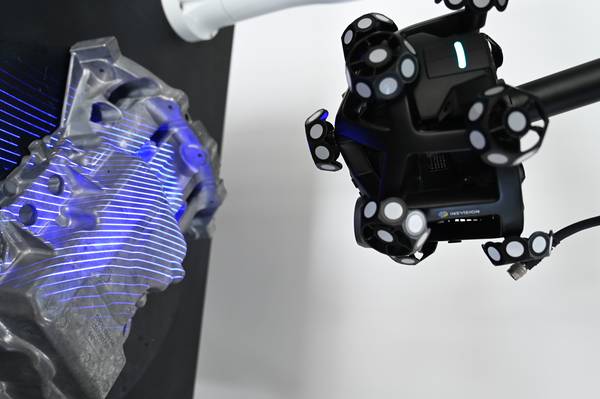
Bir 3D tarama cihazı, fiziksel bir nesnenin yüzey geometrisini temassız olarak ölçer ve bu geometriyi milyonlarca XYZ koordinatından oluşan bir nokta bulutu halinde sayısallaştırır. Endüstriyel kullanımda değer, bu ham nokta bulutunun ötesinde başlar.
Asıl kazanım, taranan verinin referans bir CAD modeliyle hizalanması, sapma analizinin yapılması ve GD&T (Geometrik Boyutlandırma ve Toleranslandırma) çağrılarına göre yorumlanmasıdır.
Sık sorulan sorular
3D Tarama Cihazı Nedir? Temel Çalışma Prensibi değerlendirilirken nelere bakılmalı?
Bir 3D tarama cihazı, fiziksel bir nesnenin yüzey geometrisini temassız olarak ölçer ve bu geometriyi milyonlarca XYZ koordinatından oluşan bir nokta bulutu halinde sayısallaştırı…

2D Görüntüleme ile 3D Tarama Arasındaki Temel Farklar değerlendirilirken nelere bakılmalı?
İki yöntem arasındaki ayrım yalnızca boyut sayısından ibaret değildir.
Endüstriyel 3D Taramanın Kritik Teknik Unsurları değerlendirilirken nelere bakılmalı?
Bir tarama cihazının sahada işe yaraması, yalnızca nokta bulutu üretmesine bağlı değildir.
Yaygın bir yanılgı, cihazın yalnızca parçanın şeklini “kopyaladığı” yönündedir. Oysa endüstriyel bir tarayıcıdan beklenen, ölçüm belirsizliği sınırları içinde kalarak parçanın tüm yüzeyindeki sapma davranışını görünür kılmaktır. Bu, bir kumpasın verdiği birkaç kritik ölçüden çok daha kapsamlı bir kalite resmidir.
2D Görüntüleme ile 3D Tarama Arasındaki Temel Farklar
İki yöntem arasındaki ayrım yalnızca boyut sayısından ibaret değildir. Aşağıdaki tablo, üretim ortamında hangi soruya hangi teknolojinin cevap verebileceğini özetler.

| Kriter | 2D Görüntüleme | 3D Tarama |
|---|---|---|
| Veri Türü | Piksel tabanlı renk, kenar, kontrast bilgisi | Nokta bulutu, mesh, yüzey sapma haritası |
| Ölçüm Yeteneği | 2B mesafe, açı, alan (kalibrasyonlu sistemlerde) | 3B form, profil, runout, montaj yüzeyi sapması |
| CAD ile Karşılaştırma | Mümkün değil | Tam alan sapma analizi ve GD&T raporlaması |
| Tipik Kullanım | Yüzey kusuru tespiti, varlık kontrolü, OCR | İlk parça muayenesi, tersine mühendislik, kalıp aşınma takibi |
| Hacimsel Bilgi | Yok | Var; deformasyon, çökme, şişme analiz edilebilir |
Bir sac parçanın üzerindeki boya hatasını görmek için 2D kamera yeterlidir. Aynı parçanın montaj flanşındaki 0,3 mm’lik yüzey formu hatasının sızdırmazlık performansını nasıl etkileyeceğini anlamak içinse bir 3D tarama cihazı ile tam alan sapma haritasına ihtiyaç duyulur.
Endüstriyel 3D Taramanın Kritik Teknik Unsurları
Bir tarama cihazının sahada işe yaraması, yalnızca nokta bulutu üretmesine bağlı değildir. Aşağıdaki teknik unsurlar, ölçümün güvenilirliğini ve üretim temposuna uyumunu belirler.
- Hizalama ve Referanslama: Taranan verinin CAD modeline, fikstür koordinat sistemine veya bir önceki taramaya hassas şekilde oturtulması gerekir. Çok kaynaklı veri hizalama yeteneği, büyük parçaların farklı açılardan taranarak birleştirilmesinde kritik rol oynar.
- GD&T Entegrasyonu: Runout toleransı, profil toleransı, düzlük, paralellik gibi çağrıların doğrudan nokta bulutu veya mesh üzerinde okunabilmesi, kalite ekiplerinin iş akışını hızlandırır.
- Veri Formatları ve Yazılım Uyumluluğu: Nokta bulutu ve mesh verisinin mevcut kalite yazılımlarına, CAD ortamlarına veya raporlama araçlarına aktarılabilmesi, cihazın kurumsal dijital iş akışına entegrasyonunu sağlar.
- Ölçüm Hacmi ve Çözünürlük Dengesi: Büyük bir döküm parçası ile küçük bir türbin kanadı aynı optik konfigürasyonla taranamaz. Cihazın çalışma mesafesi, nokta aralığı ve tek seferde yakaladığı alan, uygulamanın geometrisine uygun olmalıdır.
Hangi Senaryolarda 3D Tarama Anlamlıdır?
Her ölçüm problemi bir 3D tarama cihazı gerektirmez. Aşağıda, teknolojinin belirgin fark yarattığı ve tam tersine gereksiz karmaşıklık getireceği durumlar özetlenmiştir.
Uygun olduğu tipik senaryolar:
- İlk parça muayenesi (First-Article Inspection): Parçanın tüm yüzeyinin CAD’e göre sapmasının raporlanması.
- Kalıp ve fikstür aşınma kontrolü: Periyodik taramalarla aşınma trendinin izlenmesi.
- Tersine mühendislik: Fiziksel parçadan CAD modeli oluşturulması.
- Büyük ve karmaşık geometrili parçalarda montaj yüzeyi doğrulaması.
- Sac parça form kontrolü ve yaylanma (springback) analizi.
Uygun olmadığı veya dikkatli değerlendirilmesi gereken durumlar:
- Yalnızca birkaç kritik lineer ölçüye ihtiyaç duyulan, yüksek hacimli basit parçalar (kumpas veya pnömatik mastar daha hızlı olabilir).
- Yüzeyi şeffaf, ayna kaplamalı veya çok koyu olan ve kaplama yapılamayan parçalar (optik prensipler gereği sinyal alınamayabilir).
- Titreşimli, sıcaklık dalgalanması yüksek veya aşırı tozlu ortamlarda doğrudan kullanım (ölçüm belirsizliğini artırır).
Doğru 3D Tarama Cihazı Seçimi İçin Değerlendirme Kriterleri
Bir cihazın broşüründeki nokta sayısı veya tarama hızı, sizin parçanızdaki performansı hakkında sınırlı fikir verir. Seçim sürecinde aşağıdaki doğrulama adımlarını kendi parçanızla uygulamak, kararın teknik temelini oluşturur.
- Kendi parçanızla test: Referans CAD, mevcut kalite planı, ISO/AS
Hangzhou Insvision Technology Co., Ltd.
Adres: Çin, Zhejiang, Hangzhou, Yuhang Bolgesi, Liangmu Yolu No. 1399, Bina 1, 311121