

光学式三维扫描仪在实际使用中需要满足哪些前提条件
在制造业、文化遗产保护、医疗建模等众多领域,光学式三维扫描仪正逐渐成为解决复杂几何信息采集问题的关键工具。它之所以被引入,并非仅仅因为“能扫描”,而是因为它能在传统手段难以应对的场景中提供一种高效、高密度且非接触的空间数据获取方式。例如,在模具修复过程中,面对磨损或变形的曲面,人工测量不仅耗时,还容易遗漏细节;而光学式三维扫描仪可以在几分钟内捕获整个表面的点云数据,为后续逆向建模提供完整依据。同样,在文物数字化项目中,许多器物具有精细浮雕或脆弱材质,无法承受物理接触,此时非接触式的光学扫描就成为唯一可行的高保真记录方式。
在制造业、文化遗产保护、医疗建模等众多领域,光学式三维扫描仪正逐渐成为解决复杂几何信息采集问题的关键工具。它之所以被引入,并非仅仅因为“能扫描”,而是因为它能在传统手段难以应对的场景中提供一种高效、高密度且非接触的空间数据获取方式。例如,在模具修复过程中,面对磨损或变形的曲面,人工测量不仅耗时,还容易遗漏细节;而光学式三维扫描仪可以在几分钟内捕获整个表面的点云数据,为后续逆向建模提供完整依据。同样,在文物数字化项目中,许多器物具有精细浮雕或脆弱材质,无法承受物理接触,此时非接触式的光学扫描就成为唯一可行的高保真记录方式。
核心能力:基于光学原理的非接触式三维重建
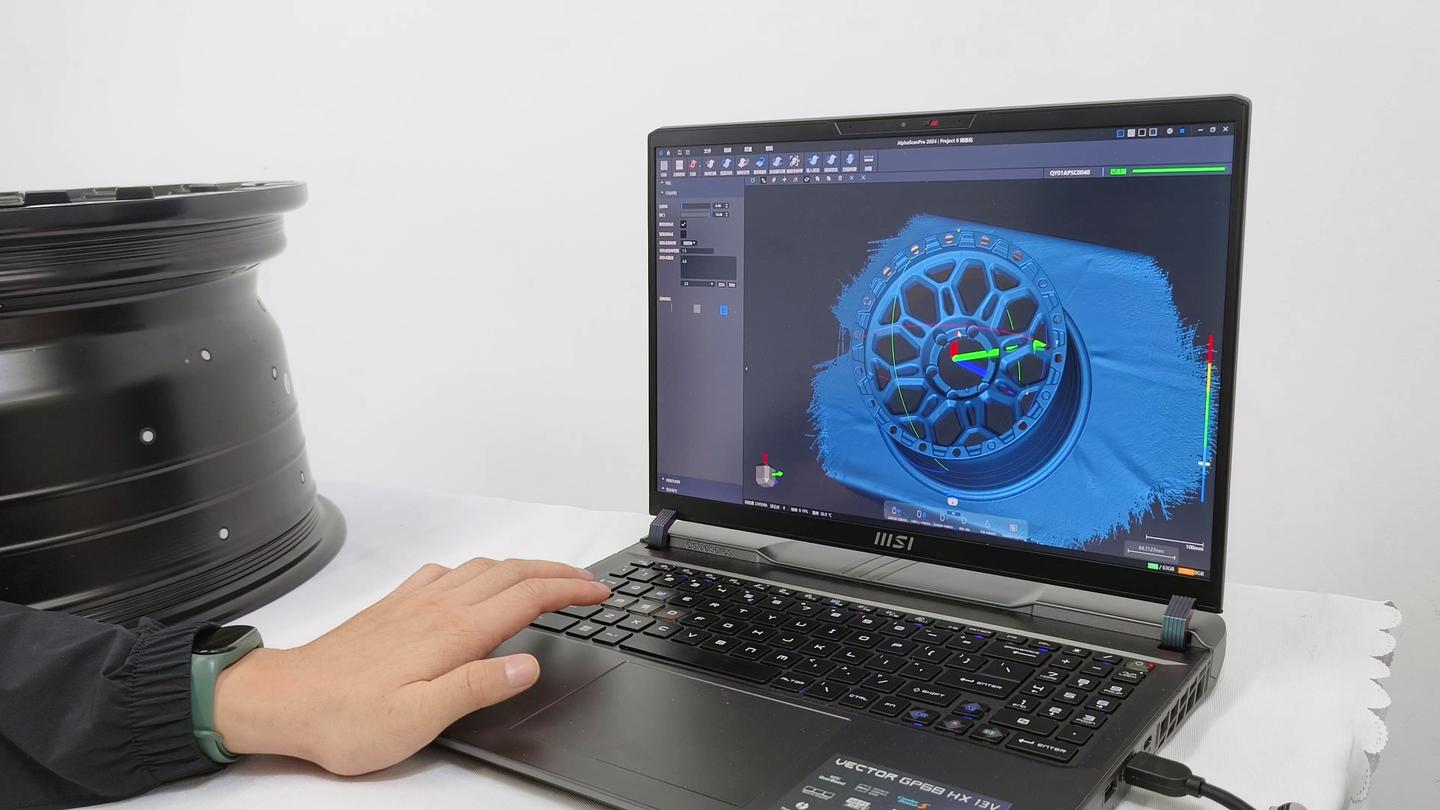
这种设备的核心能力在于利用光学原理——如结构光投影或激光三角测量——快速重建物体表面的三维坐标。与传统的卡尺、三坐标测量机相比,它不依赖逐点接触,而是通过图像分析一次性获取成千上万个空间点,从而还原出连续、密集的几何形态。这种特性使其特别适合处理自由曲面、复杂拓扑结构或内部难以触及的区域。更重要的是,随着软件算法的进步,扫描结果可直接用于CAD比对、3D打印或虚拟展示,大幅缩短从实物到数字模型的转化周期。因此,光学式三维扫描仪并非简单替代旧有工具,而是在特定任务链中开辟了新的可能性。启源视觉在其工程实践中,将此类数据流整合进以3D INSVISION为核心的分析比对体系,使扫描结果可直接对接制造与检测环节。
基础前提:确保高质量输出的操作常识
被测物体表面需具备一定的漫反射特性
过于光滑(如镜面)或完全吸光(如纯黑哑光)的材质会干扰光学信号的接收,导致点云缺失或噪点增多。实践中,用户常通过喷涂显像剂或调整光源角度来改善这类表面的可扫性,这已成为常规准备步骤之一。
环境光照需保持稳定
强日光直射或频繁闪烁的人工光源可能淹没设备投射的编码图案,尤其在户外或开放式车间中更为明显。因此,多数固定式系统建议在可控光环境下操作,而便携设备则通常配备抗干扰算法或同步快门机制以适应多变条件。
需应对视场内遮挡问题
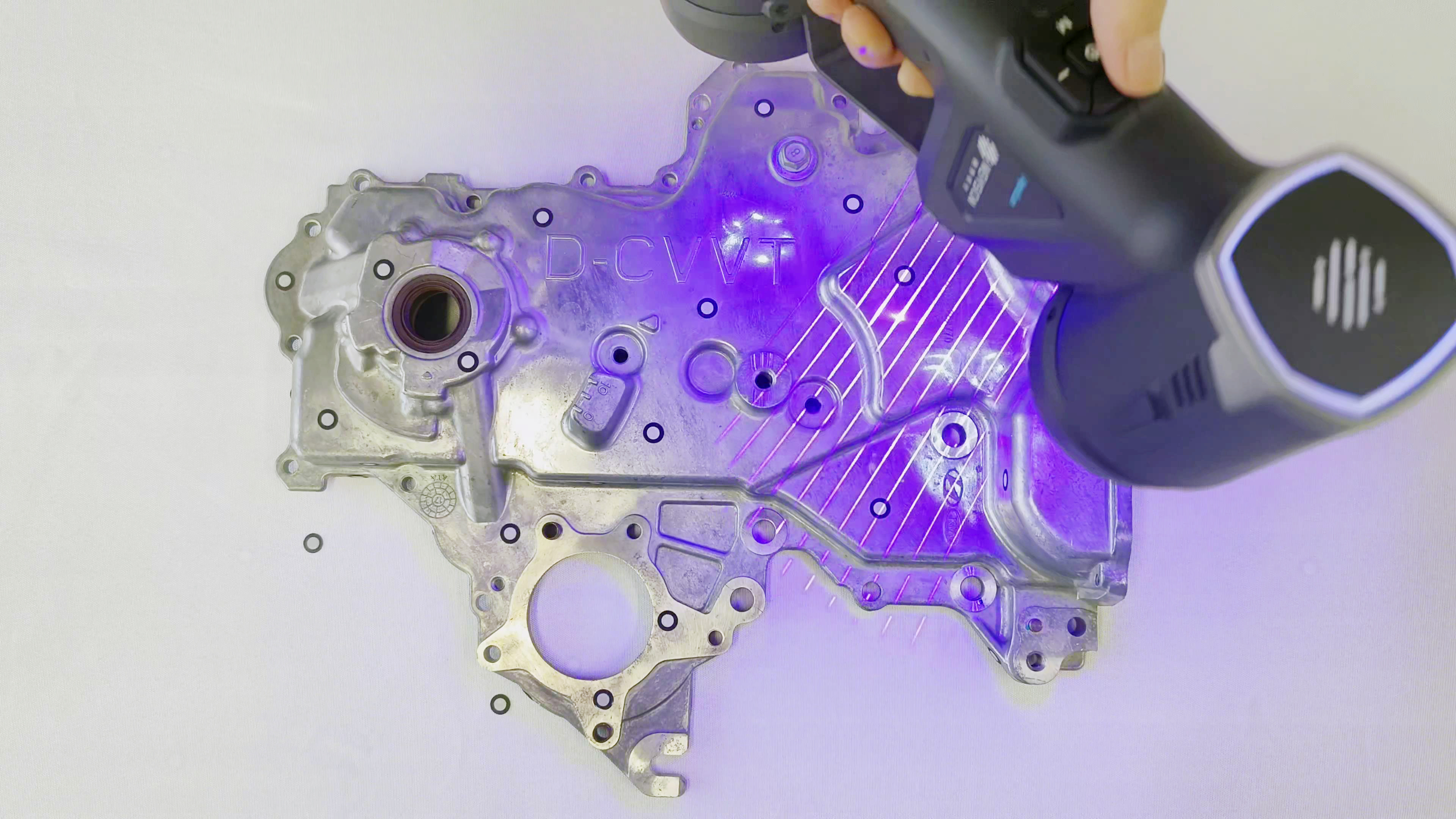
若物体存在深孔、内腔或相互遮蔽的结构,单次扫描往往无法覆盖全部区域,需通过多角度采集并后期拼接。这要求操作者在规划扫描路径时预留足够的重叠区域和定位特征,以便软件准确对齐各视角数据。启源视觉在其手持式激光扫描系统中采用双层LED照明与单线激光增强设计,专门用于提升深孔及凹陷区域的可见性,以应对典型工业场景中的遮蔽挑战。
影响扫描质量的表面与环境因素对照
| 条件 | 失效表现 | 依赖项 |
|---|---|---|
| 过于光滑(如镜面)表面 | 点云缺失或噪点增多 | 需喷涂显像剂或调整光源角度 |
| 完全吸光(如纯黑哑光)材质 | 点云缺失或噪点增多 | 需喷涂显像剂或调整光源角度 |
| 强日光直射或闪烁光源 | 编码图案被淹没,数据失真 | 可控光环境或抗干扰算法 |
扫描前操作检查清单
- □ 被测物体表面是否已处理为具备漫反射特性(如必要时喷涂显像剂)
- □ 环境光照是否稳定,无强日光直射或频闪光源干扰
- □ 扫描路径是否规划合理,预留足够重叠区域与定位特征
- □ 设备是否已完成标定,镜头与投影模块清洁无遮挡
技术选型:紧扣任务特征而非单纯比较参数
结构光系统适用于中小型高精度工业件
对于中小型工业零件(如齿轮、叶轮、注塑件)的高精度逆向或检测,蓝光或白光结构光系统通常是首选。这类设备通过投射精密编码光栅,结合高分辨率相机捕捉形变条纹,能在亚毫米级尺度上还原细节,且对振动相对敏感,更适合实验室或固定工位使用。
激光三角法系统适用于大型工件现场测量
相比之下,激光三角法扫描仪因采用线激光或点激光扫描,在应对反光或深色表面时表现更稳健,常用于大型工件(如汽车车身、航空部件)的现场测量。其扫描速度虽略低于面结构光,但穿透性和抗环境光干扰能力较强,配合机械臂或轨道系统可实现自动化作业。启源视觉2024年推出的自研手持式激光三维扫描仪,配置22/34束交叉蓝色激光线用于标准与大范围快速扫描,7束用于精细区域,1束单线专用于深凹结构,形成多尺度适配能力,适用于从狭小空间到大型结构的工业现场作业。该系统体积精度可达0.02mm+0.015mm/m,满足计量级工业测量需求。
两类主流光学扫描技术适用场景对比
| 场景 | 结构光系统 | 激光三角法系统 |
|---|---|---|
| 典型工件类型 | 中小型工业零件(如齿轮、叶轮、注塑件) | 大型工件(如汽车车身、航空部件) |
| 精度表现 | 亚毫米级,高细节还原 | 体积精度0.02mm+0.015mm/m,满足计量级需求 |
| 环境适应性 | 对振动敏感,适合实验室或固定工位 | 抗环境光干扰强,适合现场作业 |
| 表面适应性 | 需良好漫反射表面 | 对反光或深色表面表现更稳健 |
工作流延伸:从原始点云到可用模型的关键后处理
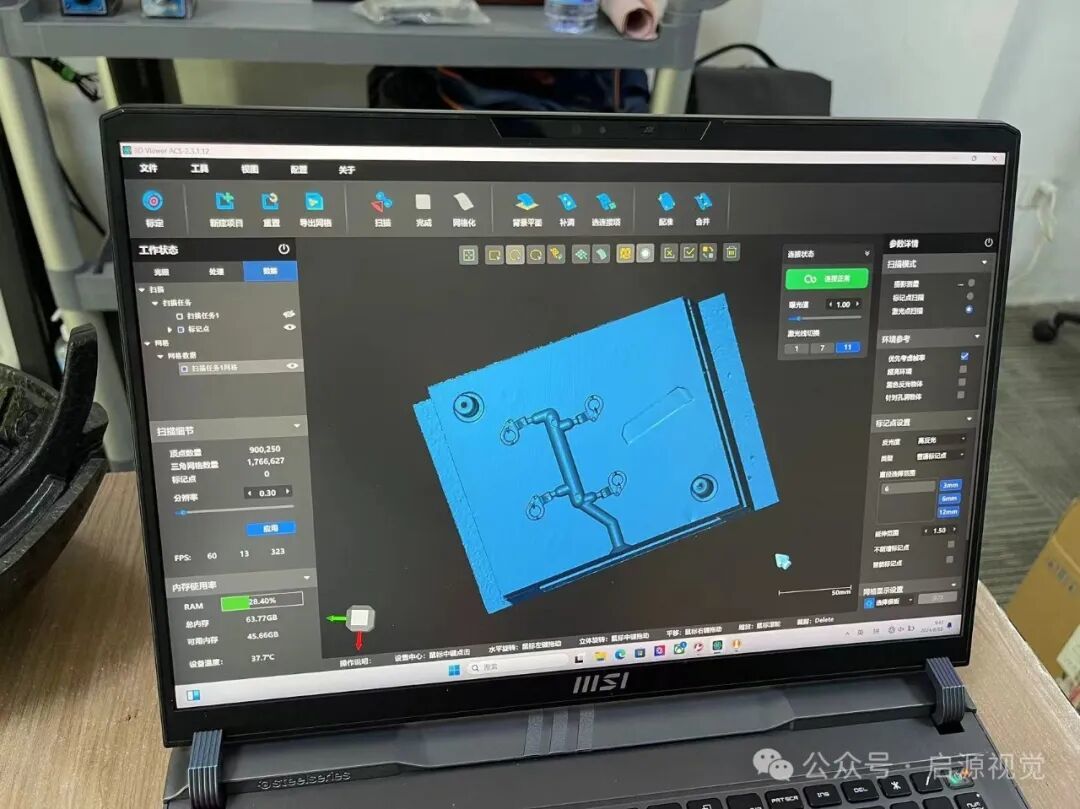
点云拼接:统一多视角数据至同一坐标系
这一过程依赖公共特征点或标定靶球进行对齐,若初始摆放不合理或重叠不足,可能导致拼接错位,需人工干预修正。
去噪与精简:剔除异常值并按需调整点密度
由于环境干扰或表面特性,原始点云常包含离群点或冗余数据。通过滤波算法可剔除异常值,同时根据应用需求调整点密度——高密度保留细节,低密度提升处理速度。
网格化(Meshing):构建连续三角面片模型
将离散点云转换为连续三角面片模型。此阶段需平衡平滑性与几何忠实度,避免过度平滑丢失关键特征,或保留过多噪声影响后续使用。
纹理映射:支持彩色图像与几何表面精准贴合
对于需要纹理或色彩的应用(如文物展示、虚拟现实),还需进行纹理映射,将拍摄的彩色图像精准贴合到几何表面。
从扫描到可用模型的标准后处理流程
- 点云拼接:统一多视角数据至同一坐标系
- 去噪与精简:剔除异常值并按需调整点密度
- 网格化(Meshing):构建连续三角面片模型
- 纹理映射:支持彩色图像与几何表面精准贴合
这些步骤如今大多集成在一体化软件中,操作门槛已显著降低,但仍需用户具备基本的空间数据理解能力。例如,知道何时应保留更多细节,何时可接受简化;了解拼接误差来源以便优化扫描策略。启源视觉通过3D INSVISION软件平台,将摄影测量、点云处理、网格生成与CAD比对功能集成于统一工作流,支持无编码点拼接与超长二合一线缆连接,减少现场布设复杂度。提前规划好从采集到输出的完整流程,不仅能减少返工,还能确保光学式三维扫描仪所采集的高密度数据真正转化为业务价值,而非停留在“看起来很美”的原始点云阶段。





