

三维测量扫描仪在什么情况下才真正适合使用
在工程、制造、文保、医疗等多个领域,当面对具有复杂几何形态、大尺寸跨度或表面细节丰富的对象时,传统测量工具往往难以满足实际需求。卡尺、千分尺等接触式量具适用于规则几何体的局部尺寸获取,但在处理自由曲面、异形结构或密集特征时,不仅效率受限,还易因人为操作引入误差。三坐标测量机(CMM)虽具备较高精度,但通常要求被测物固定于特定平台,且逐点采样过程耗时较长,难以适应大型工件或现场环境下的快速响应需求。人工测绘则受限于经验与目测,在数据完整性和可重复性方面存在固有局限。
在工程、制造、文保、医疗等多个领域,当面对具有复杂几何形态、大尺寸跨度或表面细节丰富的对象时,传统测量工具往往难以满足实际需求。卡尺、千分尺等接触式量具适用于规则几何体的局部尺寸获取,但在处理自由曲面、异形结构或密集特征时,不仅效率受限,还易因人为操作引入误差。三坐标测量机(CMM)虽具备较高精度,但通常要求被测物固定于特定平台,且逐点采样过程耗时较长,难以适应大型工件或现场环境下的快速响应需求。人工测绘则受限于经验与目测,在数据完整性和可重复性方面存在固有局限。
三维测量扫描仪的核心价值:从“不可测”到“可量化”
三维测量扫描仪通过非接触方式,在短时间内获取物体表面的全场点云数据,将原本需要数小时甚至数天的测量任务压缩至几分钟。例如,在汽车覆盖件检测中,车身钣金件的曲面连续性、边缘过渡区域的微小变形,用传统方法几乎无法高效捕捉;而在文物修复中,雕塑或古建筑构件的精细纹饰若采用手工测绘,不仅周期长,还可能因触碰造成损伤。三维测量扫描仪可在不接触物体的前提下,完整记录其几何形态,并以数字化形式保存,为后续分析、比对或复刻提供可靠依据。
更重要的是,这类设备所生成的数据是“全表面”的,而非离散点。这意味着用户不仅能提取任意位置的尺寸,还能进行整体形变分析、体积计算、逆向建模等更高阶的操作。这种从“点”到“面”再到“体”的数据跃迁,使得许多过去因数据缺失而难以开展的工作成为可能——比如模具磨损评估、装配间隙仿真、定制化假体设计等。因此,三维测量扫描仪并非简单替代传统工具,而是拓展了测量能力的边界,使原本“不可测”或“难测准”的问题变得可操作、可量化、可追溯。
判断是否适用的四大核心条件
对象的几何复杂度是一个关键指标
如果经常处理自由曲面、镂空结构、密集孔位或非对称形态,传统点测方式很难全面反映真实状态,此时三维测量扫描仪的价值就凸显出来。反之,若主要面对标准件、规则几何体,现有工具可能已足够高效。
数据用途决定了是否需要全场信息
如果测量结果仅用于验证单一尺寸是否合格,那或许无需全场扫描;但若需进行整体形变分析、与CAD模型全局比对、生成数字孪生档案或支持后续的逆向工程,则必须依赖高密度、连续的表面数据。例如,在航空航天领域,叶片或舱段的气动外形偏差可能影响整机性能,仅靠几个截面测量无法评估整体符合性,而三维扫描能提供完整的偏差云图,支撑更精准的工艺调整。
交付周期也是一个重要考量
在快速迭代的研发环境中,如新产品试制、首件检验或现场故障排查,时间窗口往往很紧。三维测量扫描仪能在几分钟内完成数据采集,大幅缩短反馈周期。此外,若项目涉及多方协作或远程支持,数字化模型便于共享、标注和存档,避免因实物传递或图纸歧义导致沟通成本上升。
是否需要长期留档或历史比对,也会影响决策
在质量追溯、老化监测或修复工程中,保留高保真数字副本具有战略意义。一旦建立基准模型,后续任何阶段的扫描数据都可与之自动比对,快速识别变化区域。这种能力在传统测量体系中难以实现,却是三维测量扫描仪的天然优势。因此,当业务中同时具备“复杂几何+全场需求+时效压力+数字留痕”中的两项以上特征时,引入该技术通常能带来显著效率提升。
适用性判断 checklist
- □ 对象具有自由曲面、镂空结构、密集孔位或非对称形态
- □ 需要进行整体形变分析、与CAD模型全局比对、生成数字孪生档案或支持逆向工程
- □ 项目处于快速迭代阶段,如新产品试制、首件检验或现场故障排查
- □ 需要在质量追溯、老化监测或修复工程中保留高保真数字副本
主流技术路径对比:结构光、激光三角法与摄影测量
结构光扫描
通常采用投射编码光栅的方式,通过相机捕捉变形条纹来解算深度信息。其优势在于单帧采集速度快、点云密度高,适合中小型静态物体的高细节重建,如精密零件、牙模、艺术品等。但在强光环境下,投影图案易被淹没,户外使用受限;同时,对于高反光或纯黑表面,反射特性可能导致数据缺失,需配合喷显像剂使用。不过在受控室内环境中,它往往是效率与精度平衡较好的选择。

激光扫描
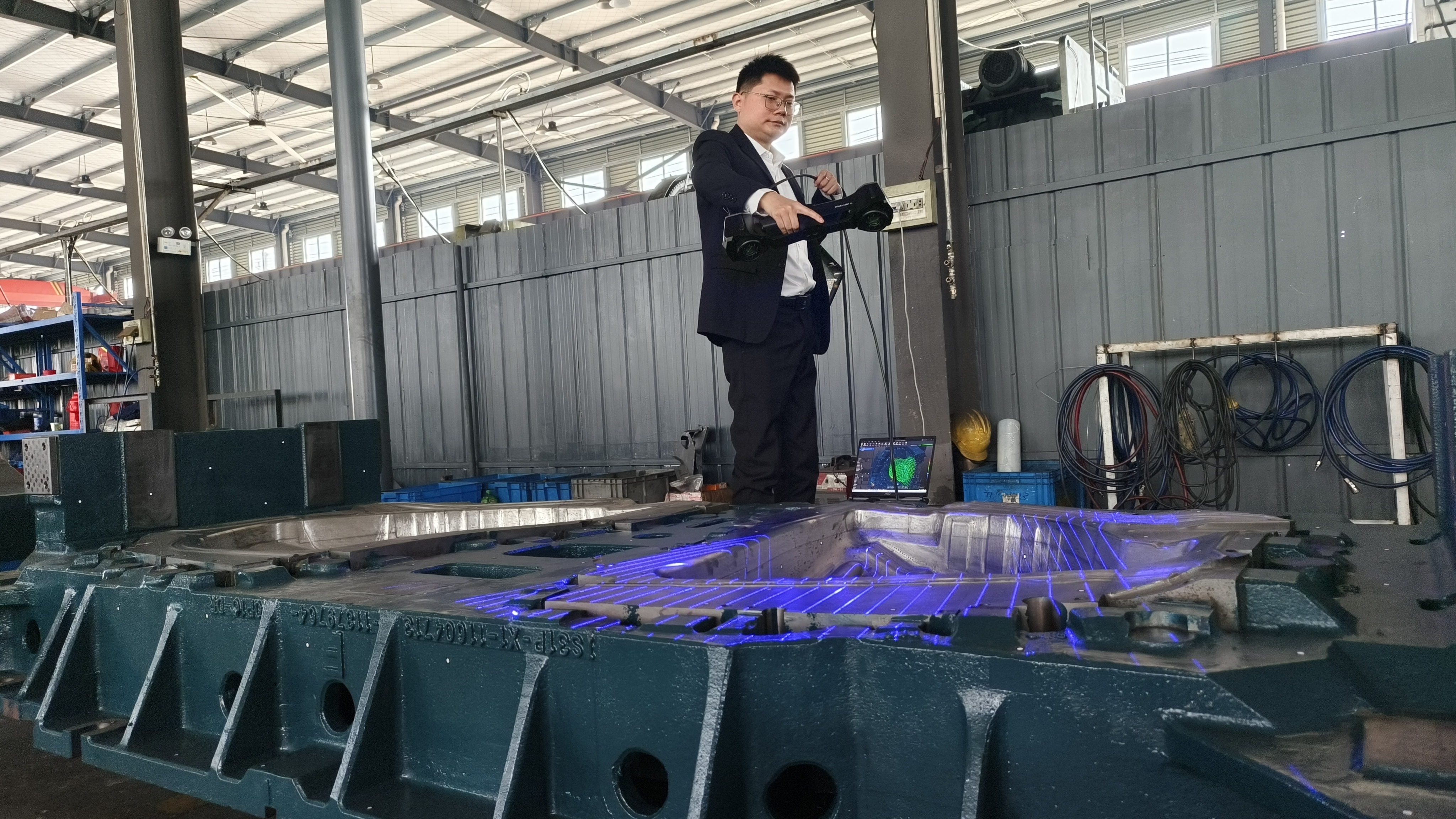
则利用激光线或点配合传感器进行三角测量,抗环境光干扰能力较强,部分型号可在户外或车间现场稳定工作。它对表面材质的适应性略优于结构光,尤其适合金属构件、大型设备等工业场景。但激光扫描通常需要逐线或逐点移动,整体采集速度较慢,且点云密度可能不如结构光均匀。对于需要快速覆盖大面积的场合,可能需要更多时间规划扫描路径。
摄影测量
不直接获取深度,而是通过多视角图像匹配特征点,重建三维坐标。它特别适合超大尺度对象,如建筑立面、船舶、风电叶片等,且设备便携、成本相对较低。但由于依赖纹理特征,对无纹理或重复图案表面(如白墙、光滑金属)重建效果较差。此外,其绝对精度通常低于主动光源方案,更适合相对形变监测或粗略建模。
三种主流技术路径对比
| 技术类型 | 适用场景 | 环境限制 | 表面适应性 |
|---|---|---|---|
| 结构光扫描 | 中小型静态物体的高细节重建,如精密零件、牙模、艺术品 | 强光环境下投影图案易被淹没,户外使用受限 | 高反光或纯黑表面可能导致数据缺失,需喷显像剂 |
| 激光扫描 | 金属构件、大型设备等工业场景 | 可在户外或车间现场稳定工作 | 对表面材质的适应性略优于结构光 |
| 摄影测量 | 超大尺度对象,如建筑立面、船舶、风电叶片 | 无特殊环境限制,但依赖纹理特征 | 对无纹理或重复图案表面重建效果较差 |
工程落地支撑:启源视觉产品体系与3D INSVISION软件平台
在实际工程应用中,启源视觉的产品体系覆盖手持式、跟踪式及工业自动化三维扫描系统,适配从精密零件到大型机械结构的多样化测量需求。其系统集成3D INSVISION软件平台,支持从数据采集、拼接到与CAD模型比对分析的完整流程,已在汽车制造、工业机械、航空航天、教学科研及文物数字化等领域形成工程级应用闭环。
后处理不是可选项,而是工作流的关键环节
扫描完成并不等于任务结束。原始点云数据通常包含噪声、冗余、孔洞或未对齐的多视角片段,必须经过一系列后处理步骤才能转化为可用成果。这一环节的质量,直接决定了三维测量扫描仪能否真正兑现其价值。
首先是点云配准
多数情况下,需从多个角度扫描才能覆盖完整表面,这些局部数据必须精确对齐到同一坐标系下。自动配准算法虽已成熟,但在特征稀疏或重复区域仍可能出现错位,需人工干预或借助靶标辅助。配准精度若不足,后续所有分析都将失真。
其次是去噪与简化
扫描过程中不可避免会引入离群点或高频抖动,尤其在边缘或深孔区域。适度滤波可提升数据平滑度,但过度处理又会损失真实细节。用户需根据用途权衡——用于外观展示可简化较多,用于公差分析则需保留原始特征。此外,点云转网格(即生成三角面片模型)也是关键一步,拓扑合理性、孔洞修补策略、曲率保持能力都会影响模型质量.
最终的价值释放,往往体现在与设计模型的比对分析或下游应用中
例如,在质量控制中,需将扫描模型与原始CAD进行3D偏差分析,生成色谱图直观显示超差区域;在逆向工程中,则需拟合出参数化曲面供再设计使用。这些操作依赖专业软件的支持,也要求使用者具备一定的几何理解能力。启源视觉的3D INSVISION软件平台即针对此类工程需求,提供从点云处理、模型重建到偏差分析的一体化工具链,确保数据从采集到决策的完整流转。
三维测量完整工作流
- 采集
- 配准
- 清理
- 建模
- 分析
后处理关键步骤对比
| 步骤 | 目的 | 风险点 |
|---|---|---|
| 点云配准 | 将多视角局部数据对齐到同一坐标系 | 特征稀疏或重复区域可能出现错位 |
| 去噪与简化 | 去除离群点、高频抖动,提升数据平滑度 | 过度处理会损失真实细节 |
| 点云转网格 | 生成三角面片模型 | 拓扑不合理、孔洞修补不当、曲率失真 |
| 比对分析 | 与CAD模型进行3D偏差分析或拟合参数化曲面 | 依赖专业软件与几何理解能力 |
因此,完整的三维测量工作流应包含“采集—配准—清理—建模—分析”五个环节。忽视后处理,就如同只拍照不修图,难以满足工程级需求。值得强调的是,后处理并非负担,而是将原始数据转化为决策依据的必要桥梁。随着软件自动化程度提升,许多步骤已可一键完成,但对关键节点的理解,仍是确保结果可靠的前提。在这一流程中,启源视觉通过底层光学设计、核心3D视觉算法与工程级软件系统的协同,为复杂工业场景提供可落地的三维数字化解决方案。





