

高精度三维激光扫描仪选型:启源视觉多场景适配逻辑解析
在三维扫描技术的实际应用中,测量误差不仅来源于设备本身的硬件性能,还受到多种外部环境与操作条件的显著影响。其中,环境光干扰是一个常见但容易被低估的因素。强光直射或反射光源可能会干扰激光接收器的信号识别,导致点云数据中出现异常点或局部缺失。尤其在户外或复杂光照条件下,这种影响并非静态存在,而是随着光源角度、强度变化而动态波动,增加了误差控制的不确定性。
在三维扫描技术的实际应用中,测量误差不仅来源于设备本身的硬件性能,还受到多种外部环境与操作条件的显著影响。其中,环境光干扰是一个常见但容易被低估的因素。强光直射或反射光源可能会干扰激光接收器的信号识别,导致点云数据中出现异常点或局部缺失。尤其在户外或复杂光照条件下,这种影响并非静态存在,而是随着光源角度、强度变化而动态波动,增加了误差控制的不确定性。
被测物体的表面特性同样对扫描结果产生关键作用。光滑或高反射率的表面容易造成激光散射或镜面反射,使得扫描仪无法准确捕捉表面轮廓;而吸光性过强的材料则可能吸收部分激光信号,降低回波强度,影响测距精度。在实际测量过程中,这种影响并非固定不变,而是随着扫描角度、入射距离和环境光条件的变化而产生差异,需要在数据采集前进行针对性的表面处理或参数调整。

操作稳定性是另一个影响测量精度的重要变量。扫描仪在移动或旋转过程中,若操作不够平稳,可能导致点云数据出现位移偏差或拼接错位。尤其是在手持式扫描或长距离扫描场景下,微小的抖动或姿态变化都会在数据中留下痕迹。因此,现场校准和操作规范的执行成为误差控制的重要环节。合理的校准策略不仅包括设备本身的初始化设置,还应涵盖扫描路径规划、参考点布置以及动态误差补偿机制,以确保在复杂环境下仍能获得稳定可靠的测量结果。
扫描参数适配逻辑
数据密度与采集效率的平衡
在实际扫描过程中,扫描参数的设定并非简单的“高精度”或“高速度”选择,而是需要根据具体的项目需求进行动态调整。其中,数据密度是影响点云质量与采集效率的核心变量之一。对于表面细节丰富的物体,如复杂曲面或微小特征结构,较高的数据密度有助于保留关键几何信息,但同时也会增加数据量,延长处理时间。相反,在大范围扫描或对细节要求较低的场景中,适当降低数据密度可以在保证整体形态完整性的前提下,提高采集效率。
扫描距离与物体复杂度的匹配
扫描距离与物体复杂度之间的关系同样需要权衡。当扫描距离较远时,激光束的扩散效应可能导致点云分辨率下降,影响对微小特征的捕捉能力。因此,在远距离扫描时,需要适当调整激光功率、采样频率和角度分辨率,以弥补信号衰减带来的精度损失。而对于近距离扫描,虽然可以获得更高的细节精度,但过高的点云密度可能会引入冗余数据,增加后续处理的复杂度。因此,合理的扫描距离设定应结合被测物体的几何特征和测量目标进行优化。
扫描速度与测量精度的取舍
此外,扫描速度与测量精度之间存在固有的矛盾。高速扫描虽然可以提升作业效率,但可能会牺牲部分点云质量,特别是在存在动态干扰或表面反射率不均的情况下,扫描速度过快可能导致数据丢失或噪声增加。因此,在实际应用中,应根据现场条件灵活调整扫描参数,例如在关键区域采用低速高密度扫描模式,而在大面积平坦区域则可适当提高扫描速度,以实现数据质量与采集效率的平衡。
点云数据后处理难点
多视角数据拼接的精度控制
三维激光扫描获取的原始点云数据通常包含大量冗余信息和噪声,需要经过一系列后处理步骤才能满足实际应用需求。其中,多视角数据拼接是后处理环节中的关键步骤,但同时也是容易引入误差的环节。不同扫描视角之间的重叠区域需要通过配准算法进行对齐,而配准精度受到特征匹配度、点云密度差异以及局部变形的影响。在实际操作中,自动配准算法虽然能够快速完成初步对齐,但往往难以完全消除微小偏差,因此仍需人工干预进行局部调整,以确保最终点云模型的几何一致性。
噪声过滤策略的场景适配
噪声过滤是另一个影响数据质量的重要因素。扫描过程中可能因环境光干扰、表面反射特性或设备稳定性问题而产生异常点,这些噪声点如果不加以处理,会在后续建模或分析过程中引入误差。然而,噪声过滤并非简单的数据剔除过程,而是需要根据具体应用场景选择合适的滤波算法。例如,在逆向工程中,需要保留物体表面的微小特征,因此不能采用过于激进的滤波策略;而在地形测绘或建筑扫描中,则可以适当放宽滤波强度,以提高数据的平滑度和可处理性。
特征提取的精度挑战
特征提取作为点云数据应用的关键环节,其精度直接关系到后续分析和建模的可靠性。在复杂几何结构中,如何准确识别边缘、曲面或特定特征点仍然是一个挑战。虽然现有软件提供了多种自动特征提取工具,但这些工具的适用性往往受限于点云质量、数据密度和目标物体的几何特性。因此,在实际应用中,仍然需要结合人工经验进行特征校正和优化,以确保最终结果的准确性。
行业应用场景的精度影响因素
在不同行业应用场景中,三维激光扫描仪的测量精度会受到多种环境变量的影响,导致其在实际应用中的表现与实验室条件下的标称精度存在差异。例如,在工业零件检测等高精度要求的场景中,振动干扰和温度梯度变化可能对测量结果产生较为显著的影响。设备在运行过程中产生的微小振动可能导致扫描仪姿态不稳定,进而影响点云数据的拼接精度。同时,温度变化可能引起扫描仪内部光学元件的热膨胀或收缩,改变激光发射和接收的角度,影响测距精度。因此,在工业检测应用中,需要采取相应的环境控制措施,如使用恒温箱或隔离振动平台,以减少外部变量对测量精度的影响。
启源视觉AlphaScan系列扫描仪的技术优势
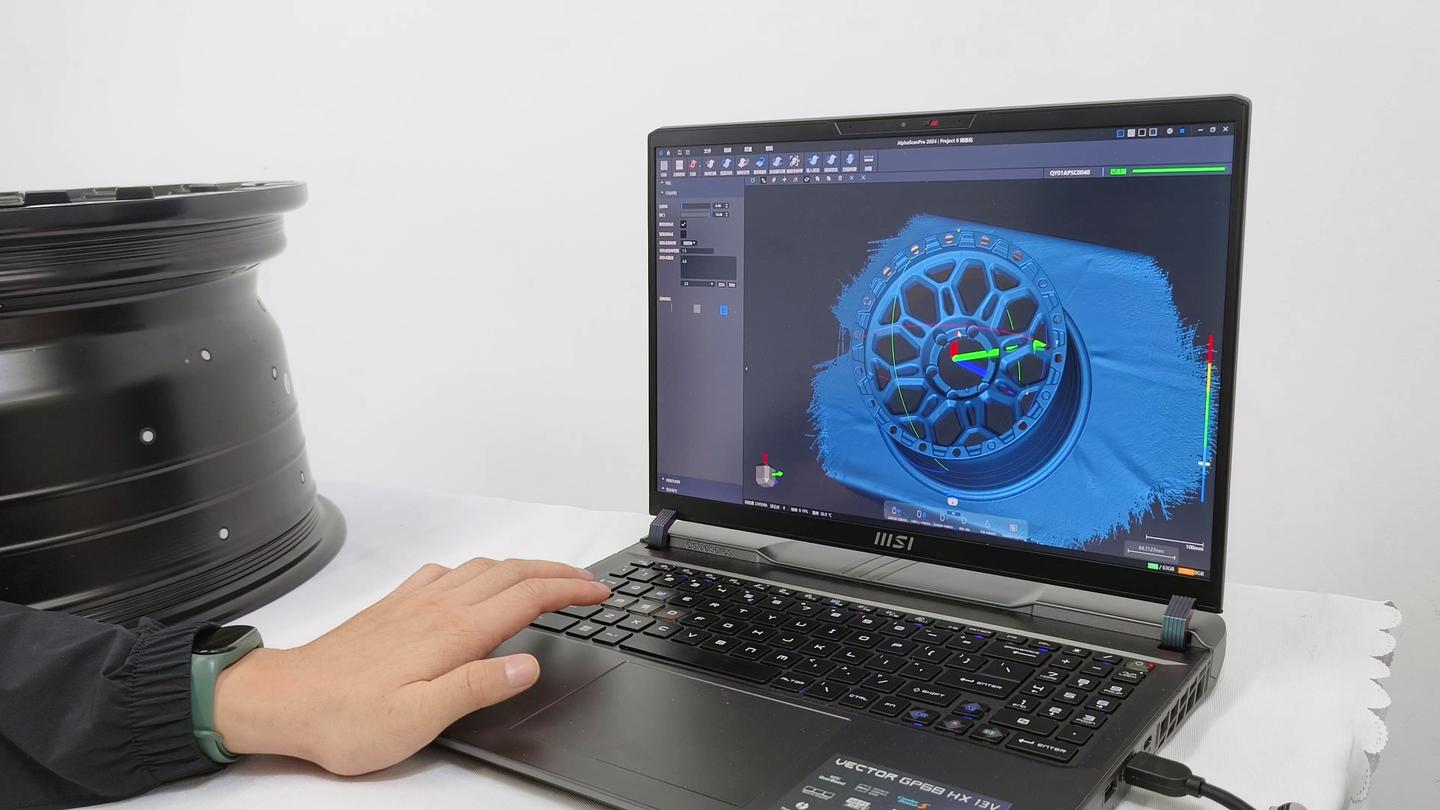
启源视觉自主研发的AlphaScan系列三维扫描仪,具备工业计量级精度,最高可达0.010mm。该系列产品基于便携式双目视觉技术,采用高精度立体标定算法,适用于精密零件、模具、工具等工业对象的高精度扫描与测量。配套软件3D INSVISION支持点云数据处理、模型拼接、特征提取与测量比对功能,满足逆向工程与质量检测的工程化需求。
先进的光学与结构设计
AlphaScan系列产品采用双层LED设计,可在深孔或凹陷区域提供更清晰的扫描效果。其激光线提取与重建算法融合AI优化技术,提升了边缘与孔位的还原精度,尤其适用于直径6mm以下的微小特征扫描。设备结构采用自研骨架设计,内部稳定性控制在0.00024mm以内,确保长时间使用下的精度稳定性。
多场景工程化部署能力
在实际应用中,AlphaScan系列扫描仪可与摄影测量系统配合使用,提升大尺寸工件的测量一致性。通过合理设置扫描路径与参数,可在不同光照与环境条件下保持较高的数据质量。该系列产品已在工业制造、精密检测、逆向建模等场景中实现工程化部署,为用户提供稳定、可重复的三维测量解决方案。启源视觉持续优化其技术路线,确保在复杂环境下的多场景适配能力,满足高精度三维扫描仪选型的实际需求。





