
3 Boyutlu Tarama Cihazı Teknolojisinin Temelleri ve Endüstriyel Uygulama Rehberi
Bir 3 boyutlu tarama cihazı, fiziksel bir nesnenin yüzey geometrisini temassız olarak sayısallaştıran ve yüksek yoğunluklu nokta bulutu haline getiren bir
3 Boyutlu Tarama Cihazı Nedir?
Bir 3 boyutlu tarama cihazı, fiziksel bir nesnenin yüzey geometrisini temassız olarak sayısallaştıran ve yüksek yoğunluklu nokta bulutu haline getiren bir ölçüm sistemidir.
Endüstriyel bağlamda bu cihazlar, parçanın gerçek üretim halini nominal CAD modeliyle karşılaştırmak, mevcut bir parçanın dijital modelini çıkarmak ya da aşınma ve deformasyon analizi yapmak için kullanılır. Temel çıktı, milyonlarca XYZ koordinatından oluşan bir nokta bulutudur;
bu veri daha sonra mesh, yüzey veya katı model haline getirilebilir.
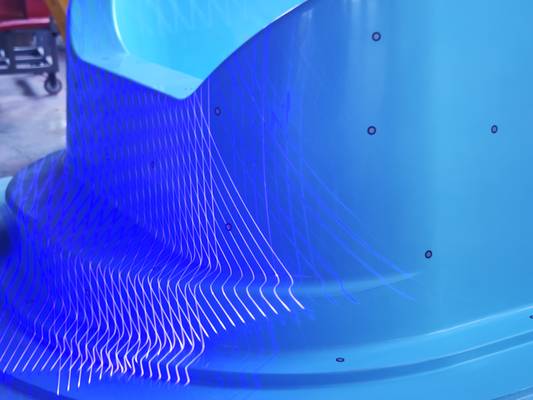
Çalışma prensibi genellikle yapılandırılmış ışık veya lazer kesit taramasına dayanır. Cihaz, nesne üzerine bilinen bir desen (çizgi, ızgara veya çoklu lazer hattı) yansıtır; kameralar bu desenin yüzey topoğrafyasına göre nasıl deforme olduğunu algılar. Üçgenleme yöntemiyle her bir noktanın uzaydaki konumu hesaplanır.
INSVISION gibi üreticilerin el tipi sistemlerinde, 50 çapraz mavi lazer hattı gibi yoğun desenler kullanılarak saniyede 7.100.000 ölçüm alınabilir. Bu, büyük bir döküm parçasının tüm yüzey verisinin yaklaşık üç dakikada toplanması anlamına gelir.
Teknolojinin Temel Bileşenleri
Bir 3 boyutlu tarama cihazının sahadaki başarısını belirleyen birkaç kritik teknik unsur vardır. Bunları doğruluk, hız, yüzey uyumluluğu ve veri işleme başlıkları altında toplamak mümkün.
Metrolojik doğruluk ve tekrarlanabilirlik: Endüstriyel tarayıcılar için doğruluk genellikle mikrometre seviyesinde ifade edilir. Örneğin INSVISION AlphaVista, 0,020 mm metroloji sınıfı hassasiyet sunar. Ancak bu değer, cihazın kalibrasyon sertifikasındaki laboratuvar koşullarına aittir.
Atölye ortamında sıcaklık dalgalanmaları, titreşim ve operatör hareketi gibi etkenler bu rakamı etkileyebilir. Bu nedenle doğruluk, her zaman parçanın GD&T tolerans penceresiyle birlikte değerlendirilmelidir.
Tarama hızı ve veri yoğunluğu: Saniyede toplanan nokta sayısı, ölçüm süresini doğrudan belirler. 7,1 milyon ölçüm/saniye gibi yüksek hızlar, büyük parçaların gözetimsiz (unattended) modda taranabilmesine olanak tanır.
Operatör taramayı başlatır ve cihaz tripod üzerinde ya da robot kolunda belirlenen alanı kendi kendine tarar.

Zorlu yüzeylerle başa çıkma: Siyah, şeffaf veya yüksek yansımalı yüzeyler optik taramanın geleneksel zayıf noktasıdır. Mavi lazer teknolojisi, kırmızı lazere kıyasla daha kısa dalga boyu sayesinde parlak yüzeylerde daha az saçılma ve daha yüksek sinyal-gürültü oranı sağlar.
Ayrıca çoklu çapraz lazer hatları, tek bir hatlı sistemlere göre gölge bölgeleri azaltır ve derin oyuklarda bile veri kaybını en aza indirir.
INSVISION’ın 1070 g ağırlığındaki el tipi tasarımı, operatörün cihazı dar boşluklara sokabilmesini ve geniş bir tarama alanını (2200×2200 mm) tek seferde kapsayabilmesini mümkün kılar.
Veri işleme ve yazılım: Ham nokta bulutu, anlamlı bir çıktıya dönüşmek için hizalama, filtreleme ve mesh oluşturma adımlarından geçer. Modern yazılımlar, tarama sırasında canlı sapma haritası (deviation map) oluşturarak operatöre anında geri bildirim verir.
Bu sayede eksik bölgeler hemen fark edilir ve tarama tamamlanmadan müdahale edilebilir.
Temaslı Ölçüm ve Optik Tarama Arasındaki Fark
Atölyelerde sıklıkla sorulan sorulardan biri, 3 boyutlu tarama cihazının bir CMM’in (Koordinat Ölçüm Makinesi) yerini alıp alamayacağıdır. Cevap, uygulamanın doğasına bağlıdır. Aşağıdaki tablo iki yöntemin kategorik farklarını özetler.
| Özellik | Temaslı Ölçüm (CMM) | Optik 3B Tarama |
|---|---|---|
| Veri toplama şekli | Tek nokta, temaslı | Tam alan, temassız |
| Hız | Yavaş (yüzlerce nokta/dk) | Çok hızlı (milyonlarca nokta/sn) |
| Yüzey hassasiyeti | Sert malzeme gerektirir | Hemen her yüzey |
| Karmaşık geometri | Derin delik ve dar yarıklarda sınırlı | Gölge bölgeler hariç yüksek erişim |
| Doğruluk seviyesi | Mikron altı mümkün | Tipik olarak 0,020-0,050 mm |
| Operatör bağımlılığı | Programlamaya bağlı, düşük | El tipi sistemlerde orta |
CMM, geometrik toleransların referans doğrulamasında hâlâ altın standarttır. Ancak bir döküm parçasının tüm yüzey profilini çıkarmak ya da bir kaynaklı montajın çarpılma analizini yapmak gerektiğinde, optik tarama hem hız hem de veri zenginliği açısından belirgin üstünlük sağlar.
Çoğu üretim ortamında iki yöntem birbirini tamamlayıcı olarak konumlandırılır.
Hangi Uygulamalarda Anlamlıdır, Nerede Sınırda Kalır?
3 boyutlu tarama cihazı her ölçüm problemi için ideal çözüm değildir. Aşağıdaki senaryolar, teknolojinin güçlü olduğu ve zorlandığı alanları gösterir.

Güçlü olduğu uygulamalar:
- İlk parça muayenesi (FAI): Karmaşık döküm veya plastik enjeksiyon parçalarının tüm yüzeyini CAD ile karşılaştırmak.
- Tersine mühendislik: Teknik resmi olmayan eski yedek parçaların dijital modele dönüştürülmesi.
- Deformasyon ve aşınma analizi: Seri üretimden alınan numunelerin nominal modele göre sapma haritasının çıkarılması.
- Büyük hacimli parçalar: 2 metreyi aşan kaynaklı konstrüksiyonların yerinde taranması.
Sınırda kaldığı durumlar:
- Mikron altı tolerans gerektiren hassas delik çapı ve silindiriklik ölçümleri (burada CMM veya özel iç çap ölçerler daha uygundur).
- Tamamen şeffaf veya ayna kaplamalı yüzeyler (geçici matlaştırıcı sprey gerekebilir).
- Derin ve dar kanalların tabanına optik erişimin mümkün olmadığı geometriler.
3 Boyutlu Tarama Cihazı Seçerken Değerlendirme Adımları
Bir cihaz satın almadan önce teknik ekibin aşağıdaki doğrulama adımlarını kendi parçaları üzerinde uygulaması, uzun vadeli memnuniyeti belirleyen en kritik faktördür.
- Tolerans yığını ile doğruluk eşleştirmesi: Cihazın katalog doğruluğu (ör. 0,020 mm) ile parçanızın kritik toleransları arasındaki ilişkiyi inceleyin. Eğer parça toleransınız ±0,1 mm ise bu doğruluk yeterlidir; ±0,01 mm ise cihaz tek başına yeterli olmayabilir.
- Temsili parça testi: Üretim hattınızdan üç parça seçin: nominal ölçüde, üst tolerans sınırında ve alt tolerans sınırında birer numune. Her birini tarayın ve sonuçları mevcut CMM referans ölçümlerinizle karşılaştırın. Sapma değerleri GD&T çağrı penceresi içinde kalıyorsa cihaz doğrulama testini geçer.
- Gerçek atölye koşullarında test: Cihazı yalnızca kalite odasında değil, titreşimli dökümhane zemininde veya kaynak atölyesinde deneyin. Sıcaklık değişimi, ortam ışığı ve toz gibi faktörlerin tarama kalitesine etkisini gözlemleyin.
- Yazılım iş akışı uyumu: Toplanan nokta bulutunun mevcut CAD/CAM veya kalite yazılımlarınıza ne kadar sürede ve hangi formatta aktarıldığını doğrulayın.
Hangzhou Insvision Technology Co., Ltd.
Adres: Çin, Zhejiang, Hangzhou, Yuhang Bolgesi, Liangmu Yolu No. 1399, Bina 1, 311121