
2D-камера или 3D-сканер: принципы работы, данные и роль в реверс-инжиниринге 3D
Чем отличается 2D-съёмка от 3D-сканирования, какие данные получает инженер и почему реверс инжиниринг 3D требует именно объёмной оцифровки.
Что фиксирует камера, а что — 3D-сканер
Двумерная съёмка — будь то промышленная камера высокого разрешения или система машинного зрения — регистрирует распределение яркости и цвета на плоскости. Результат всегда представляет собой матрицу пикселей, лишённую информации о глубине.
Даже стереопары или методы фотограмметрии, восстанавливающие объём по серии снимков, опираются на косвенные вычисления и требуют идеальных условий освещения, текстурных поверхностей и стабильной геометрии съёмки.

Практический процесс
- Что фиксирует камера, а что — 3D-сканер — Двумерная съёмка — будь то промышленная камера высокого разрешения или система машинного зрения — регистрирует распределение ярко…
- Форматы данных и их инженерная ценность — Для инженера-технолога эта таблица объясняет, почему попытка восстановить посадочные места фланца по фотографии обречена на накоп…
- Где проходит граница применимости — 2D-системы машинного зрения отлично справляются с задачами контроля наличия компонентов, чтения маркировки, обнаружения поверхнос…
- Промышленный пример: от фото к цифровому двойнику — Рассмотрим типовую ситуацию на машиностроительном предприятии.
Трёхмерный сканер, напротив, напрямую измеряет пространственные координаты точек поверхности. В зависимости от принципа — структурированный подсвет, лазерная триангуляция, времяпролётный метод — прибор формирует облако точек, каждая из которых несёт три координаты (X, Y, Z).
Это облако становится основой для построения полигональной сетки, а затем и твердотельной CAD-модели. Именно такой поток данных необходим для реверс-инжиниринга 3D, где критичны не визуальное сходство, а субмиллиметровая точность и возможность передачи геометрии в САПР.
Форматы данных и их инженерная ценность
| Характеристика | 2D-изображение | 3D-скан |
|---|---|---|
| Тип данных | Растровая матрица (пиксели) | Облако точек, полигональная сетка |
| Информация о глубине | Отсутствует (или вычисляется косвенно) | Прямое измерение |
| Привязка к системе координат | Нет | Есть, в реальных единицах (мм) |
| Возможность измерения геометрии | Только 2D-размеры с искажениями перспективы | Полноценные 3D-измерения, GD&T-анализ |
| Использование в CAD/CAM | Требует ручного перечерчивания | Прямая передача в виде сетки или NURBS-поверхностей |
Для инженера-технолога эта таблица объясняет, почему попытка восстановить посадочные места фланца по фотографии обречена на накопление погрешностей. Камера не даёт ни масштаба, ни привязки к базовым плоскостям, ни информации о внутренних полостях.
3D-сканер же выдаёт метрически достоверную цифровую копию, готовую к сравнению с номиналом или к доработке в CAD-среде.

Где проходит граница применимости
2D-системы машинного зрения отлично справляются с задачами контроля наличия компонентов, чтения маркировки, обнаружения поверхностных дефектов и сортировки. Их скорость и простота интеграции делают их незаменимыми на конвейере.
Но как только требуется ответить на вопрос «соответствует ли реальная геометрия отливки допускам, заданным в ISO 2768», двумерного снимка недостаточно.
3D-сканирование становится безальтернативным в сценариях, где:
- отсутствует исходная конструкторская документация;
- деталь имеет сложную органическую форму (лопатки турбин, коллекторы, пластиковые корпуса);
- необходимо провести инспекцию первого изделия (FAI) с построением карты отклонений;
- выполняется реверс инжиниринг 3D для последующей модернизации узла.
Промышленный пример: от фото к цифровому двойнику
Рассмотрим типовую ситуацию на машиностроительном предприятии. В эксплуатации находится корпус редуктора 1990-х годов. Чертежи утеряны, поставщик прекратил поддержку. Инженер делает серию снимков на зеркальную камеру, пытаясь вручную обвести контуры в CAD.
На измерение межосевых расстояний и радиусов сопряжений уходят часы, а итоговая модель не учитывает литейные уклоны и усадку. При установке восстановленной детали обнаруживается несоосность.
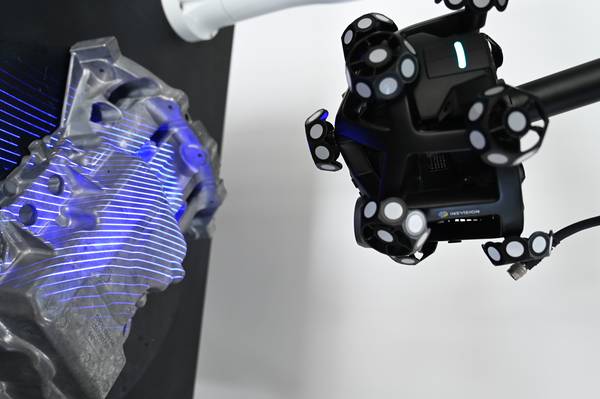
Альтернативный путь: технолог использует ручной лазерный 3D-сканер, например, из линейки INSVISION, и за один проход получает облако точек всей наружной поверхности. Встроенное программное обеспечение выравнивает сканы, фильтрует шумы и строит полигональную модель.
Затем инженер в специализированном модуле обратного проектирования восстанавливает конструктивные элементы — плоскости, цилиндры, карманы — и получает параметрическую CAD-модель, готовую к производству на станке с ЧПУ.
Весь цикл, от первого скана до управляющей программы, заметно короче ручного перечерчивания, а точность соответствует допускам на корпусные детали.
Распространённое заблуждение: фотограмметрия как замена сканированию
Нередко можно услышать, что современная фотограмметрия «почти как 3D-сканер». Алгоритмы Structure from Motion действительно способны по множеству перекрывающихся снимков построить облако точек.
Однако этот метод критически зависит от текстуры поверхности: гладкий металлический корпус без нанесённых маркеров даст провалы в данных. Кроме того, фотограмметрия не обеспечивает прослеживаемой точности в реальных единицах без дополнительного масштабирования по эталонным мерам.
Для задач, где требуется документированная неопределённость измерений, такой подход остаётся вспомогательным, а не основным.

Что важно запомнить
Выбор между 2D-камерой и 3D-сканером — это не вопрос «что лучше», а вопрос «какие данные нужны для принятия инженерного решения». Если задача сводится к визуальной фиксации состояния поверхности или наличию компонента, двумерного изображения достаточно.
Если же цель — получить измеримую, масштабируемую и готовую к CAD-обработке геометрию, без трёхмерного сканирования не обойтись.
Именно этот переход от плоской картинки к цифровому двойнику лежит в основе современного подхода к реверс инжиниринг 3D и позволяет производственным компаниям сокращать время подготовки оснастки, исключать дорогостоящие итерации и продлевать жизненный цикл оборудования с утерянной документацией.
Hangzhou INSVISION Technology Co., Ltd.
Адрес: Китай, провинция Чжэцзян, Ханчжоу, район Юйхан, Liangmu Road 1399, корпус 1, 311121